Laborleitung
Raum 04.105





Das Labor für Robotik und Brain Computer Interfaces (BCI) konzentriert sich auf die Lehre und Forschung in den Bereichen der künstlichen Intelligenz, der Entwicklung von biologisch inspirierten, autonomen Robotersystemen sowie der Entwicklung von Brain Computer Interfaces (BCI ) zum Einsatz in der Medizintechnik. Querschnittsthema der Forschung und Anwendung bildet die Algorithmen des maschinellen Lernens, die auf Basis der Erkenntnisse bzgl. der Informationsverarbeitung im menschlichen Gehirn, entwickelt werden.
Weitere wissenschaftliche Schwerpunkte bildet der Entwurf von sogenannten “Simulierten Realitäten” (VR/AR) zur Simulation und Evaluation der Interaktionen zwischen Mensch, Maschine und Umwelt, der Entwicklung generativer Modelle menschlicher Bewegungen, sowie die Entwicklung von kortikalen, exoprothetischen Komponenten.
Projekte und Praktika eröffnen einen Einblick in die Prinzipien der Informationsverarbeitung im menschlichen Gehirn und wie diese zur Entwicklung intelligenter, autonomer Systeme eingesetzt werden. Die Studierende können Praktikums- und Projektarbeiten aus folgenden Bereichen wählen.
Ausstattung
- Robotische Systeme
-
- Roboter Arnold (Eigene Entwicklung)
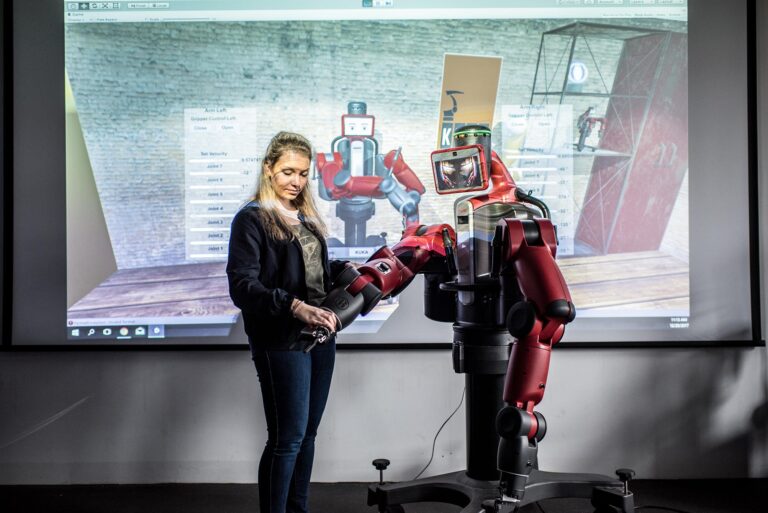
- Roboter Baxter
- KUKA LWR
- Humanoide NAO-Roboter
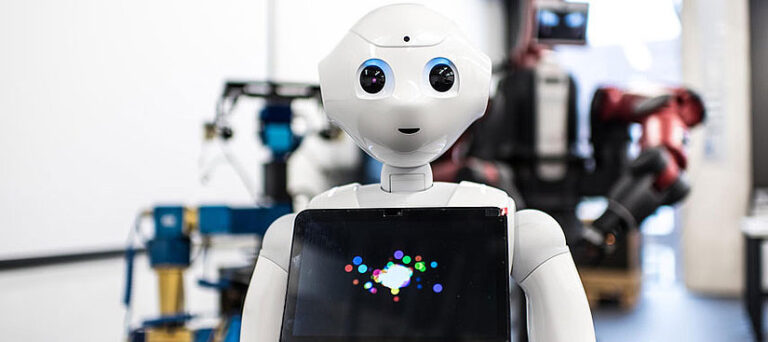
- Pepper Roboter
- Radgetriebene E-puck-Roboter
- Simulationsumgebungen Unity3D/Webots
-
- Robotersysteme
- Humanoide Avatare
- Diagnose und Reha
-
- EEG und EMG Geräte
- Motion Tracking (XSens)
Praktika
- PRAKTIKUM DER AUTONOMEN ROBOTIK
- E-Puck Kleinstroboter: Diese Roboter werden unter Verwendung von MATLAB gesteuert und programmiert. Die Aufgaben befassen sich mit der Implementierung der Kinematik und von Funktionen, die das direkte Anfahren von Zielpunkten und Trajektorien ermöglichen.
- Simulationsumgebung Webots: Im Simulator sind verschiedene Roboterplattformen wie NAO, E-Pucks, YouBot, Baxter etc. implementiert und können über diverse Programmiersprachen angesprochen werden. Die Aufgaben befassen sich mit Hindernissvermeidung für mobile Roboter und der Implementierung von Roboterarmbewegungen.
- PRAKTIKUM DER AUTONOMEN SYSTEME
-
- Dynamische Systeme: Erzeugen/Modellieren von Roboterbewegungen
- Maschinelles Lernen: Vergleich dreier Standardalgorithmen
- Reinforcement Learning: OpenAI-Gym
- Signalverarbeitung: EMG-Signale
- Signalverarbeitung: EEG-Signale
- Klassifikation neuronaler Signale
-
- FORTGESCHRITTENEN PRAKTIKUM DER MOBILEN MANIPULATION
- im Aufbau
Projekte
- Gehirn-Computer-Schnittstelle (BCI)
- Messung und Klassifizierung von EMG-Signalen
- Messung und Klassifizierung von EEG-Signalen
- Nutzung von EMG/EEG zur Steuerung prothetischer Geräte
- Stimulierung von bewegungsbezogenen EMG-Signalen des Arms
- Maschinelles Lernen
- Theorie der neuronalen Netze und Komplexitätsmaße
- Theorie des verstärkenden Lernens
- Anwendung des maschinellen Lernens auf Klassifikationsprobleme
- Entwurf und Steuerung von robotischen Systemen/Exoskeletten
- Selbstorganisierte Fuzzy-Neuronale Netze
- Nutzung der Muskelermüdung zur adaptiven Steuerung eines Exoskeletts für die oberen Extremitäten
- Steuerung eines aktuierten Hand-Exoskeletts
- SLAM — Kartierung und Navigation
- Virtuelle- und Erweiterte Realität
- Gamification von Rehabilitationsszenarien für Schlaganfall- und Parkinson-Patienten
-
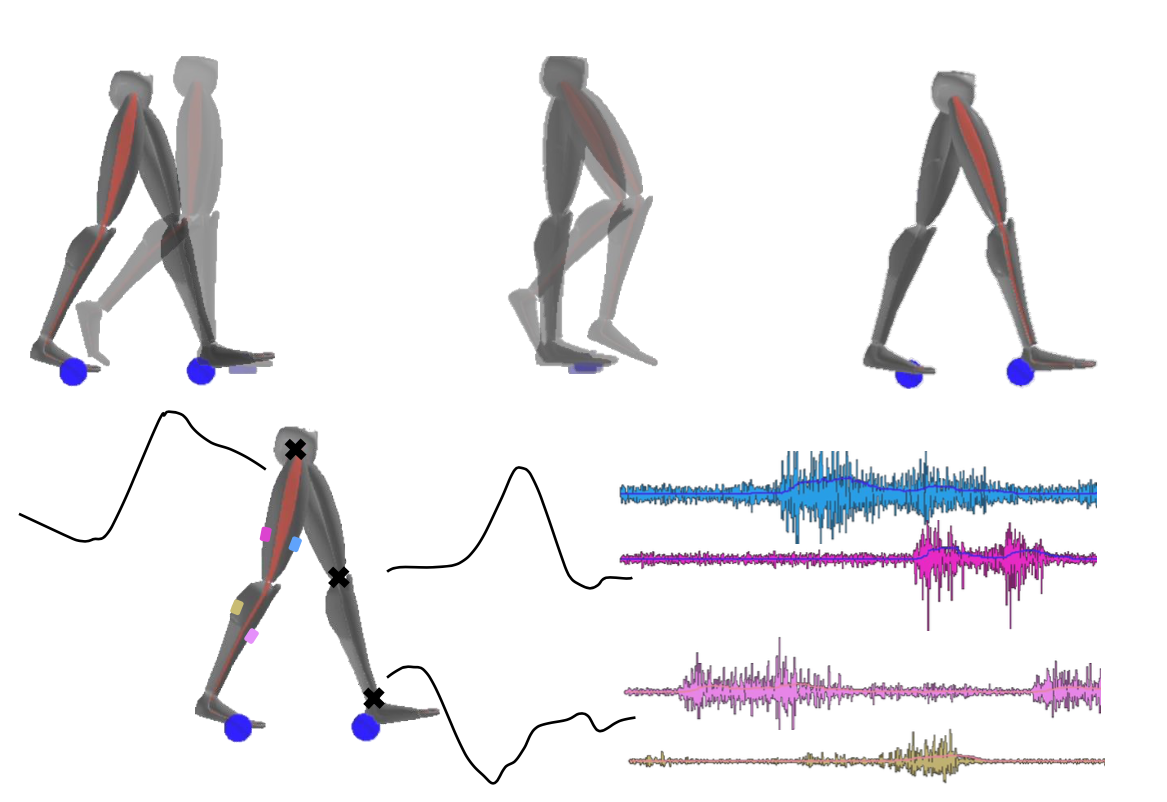
- Ganganalyse
-

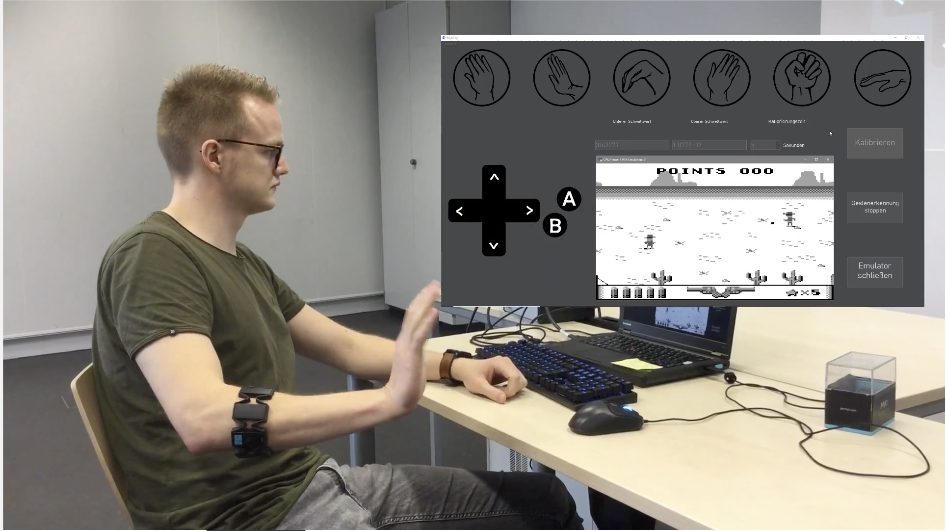
- EMG Game Controller
-
- EEG Game Controller

-

- EMG + Bewegungstraining

Praktika:
- PRAKTIKUM DER AUTONOMEN ROBOTIK
- E-Puck Kleinstroboter: Diese Roboter werden unter Verwendung von MATLAB gesteuert und programmiert. Die Aufgaben befassen sich mit der Implementierung der Kinematik und von Funktionen, die das direkte Anfahren von Zielpunkten und Trajektorien ermöglichen.
- Simulationsumgebung Webots: Im Simulator sind verschiedene Roboterplattformen wie NAO, E-Pucks, YouBot, Baxter etc. implementiert und können über diverse Programmiersprachen angesprochen werden. Die Aufgaben befassen sich mit Hindernissvermeidung für mobile Roboter und der Implementierung von Roboterarmbewegungen.
- PRAKTIKUM DER AUTONOMEN SYSTEME
- Dynamische Systeme: Erzeugen/Modellieren von Roboterbewegungen
- Maschinelles Lernen: Vergleich dreier Standardalgorithmen
- Reinforcement Learning: OpenAI-Gym
- Signalverarbeitung: EMG-Signale
- Signalverarbeitung: EEG-Signale
- Klassifikation neuronaler Signale
- FORTGESCHRITTENEN PRAKTIKUM DER MOBILEN MANIPULATION
- im Aufbau
Projekte:
- Gehirn-Computer-Schnittstelle (BCI)
- Messung und Klassifizierung von EMG-Signalen
- Messung und Klassifizierung von EEG-Signalen
- Nutzung von EMG/EEG zur Steuerung prothetischer Geräte
- Stimulierung von bewegungsbezogenen EMG-Signalen des Arms
- Maschinelles Lernen
- Theorie der neuronalen Netze und Komplexitätsmaße
- Theorie des verstärkenden Lernens
- Anwendung des maschinellen Lernens auf Klassifikationsprobleme
- Entwurf und Steuerung von robotischen Systemen/Exoskeletten
- Selbstorganisierte Fuzzy-Neuronale Netze
- Nutzung der Muskelermüdung zur adaptiven Steuerung eines Exoskeletts für die oberen Extremitäten
- Steuerung eines aktuierten Hand-Exoskeletts
- SLAM — Kartierung und Navigation
- Virtuelle- und Erweiterte Realität
- Gamification von Rehabilitationsszenarien für Schlaganfall- und Parkinson-Patienten
Labor-Website:
")