Schmidt, Marie D.; Iossifidis, Ioannis The Spatial and~Temporal Resolution of~Motor Intention in~Multi-target Prediction Proceedings Article In: Neumann, Philipp; Puma, Michael J.; Lees, Michael H.; Groen, Derek; Dongarra, Jack J.; Sloot, Peter M. A. (Hrsg.): Computational Science – ICCS 2026, S. 421–428, Springer Nature Switzerland, Cham, 2026, ISBN: 978-3-032-29924-6. Abstract | Links | BibTeX | Schlagwörter: BCI, EMG, HMI, Motor control, Random Forest Fidêncio, Aline Xavier; Grün, Felix; Klaes, Christian; Iossifidis, Ioannis Performance Boundaries for~Brain-Computer Interfaces Using Error-Related Potentials and~Reinforcement Learning Proceedings Article In: Nicosia, Giuseppe; Ojha, Varun; Giesselbach, Sven; Pardalos, M. Panos; Umeton, Renato; Emanuele, La Malfa; Gabriele, La Malfa (Hrsg.): Machine Learning, Optimization, and Data Science, S. 335–349, Springer Nature Switzerland, Cham, 2026, ISBN: 978-3-032-21480-5. Abstract | Links | BibTeX | Schlagwörter: adaptive brain-computer interface, BCI, electroencephalography (EEG), error-related potentials (ErrPs), Machine Learning, motor imagery (MI), reinforcement learning (RL) Lehmler, Stephan Johann; Saif-ur-Rehman, Muhammad; Glasmachers, Tobias; Iossifidis, Ioannis Distributional Properties of~ReLU-Activations in~Artificial Neural Networks That~Learn by~Memorization Proceedings Article In: Nicosia, Giuseppe; Ojha, Varun; Giesselbach, Sven; Pardalos, M. Panos; Umeton, Renato; Emanuele, La Malfa; Gabriele, La Malfa (Hrsg.): Machine Learning, Optimization, and Data Science, S. 410–423, Springer Nature Switzerland, Cham, 2026, ISBN: 978-3-032-21477-5. Abstract | Links | BibTeX | Schlagwörter: Artificial neural networks, BCI, Machine Learning, Memorization, Statistical Modeling Grün, Felix; Saif-ur-Rehman, Muhammad; Glasmachers, Tobias; Iossifidis, Ioannis Invariance to~Quantile Selection in~Distributional Continuous Control Proceedings Article In: Nicosia, Giuseppe; Ojha, Varun; Giesselbach, Sven; Pardalos, M. Panos; Umeton, Renato; Emanuele, La Malfa; Gabriele, La Malfa (Hrsg.): Machine Learning, Optimization, and Data Science, S. 175–190, Springer Nature Switzerland, Cham, 2026, ISBN: 978-3-032-21477-5. Abstract | Links | BibTeX | Schlagwörter: Actor-critic, BCI, Continuous control, Distributional reinforcement learning, Machine Learning, Quantile regression, reinforcement learning (RL) Schmidt, Marie Dominique; Iossifidis, Ioannis The Spatial and Temporal Resolution of Motor Intention in Multi-Target Prediction Artikel In: arXiv:2603.05418 [q-bio.NC], 2026. Abstract | Links | BibTeX | Schlagwörter: BCI, Machine Learning, Motor control Schmidt, Marie D.; Glasmachers, Tobias; Iossifidis, Ioannis Insights into Motor Control: Predict Muscle Activity from Upper Limb Kinematics with LSTM Networks Artikel In: Nature Scientific Reports, 2026, ISSN: 2045-2322. Abstract | Links | BibTeX | Schlagwörter: BCI, Computational biology and bioinformatics, Motor control, Neuroscience Finkel, Marcel; Erle, Lukas; Timm, Lara; Arntz, Alexander; Helgert, André; Straßmann, Carolin; Eimler, Sabrina C. Need Satisfaction in Human-Robot Interaction in Public Spaces – A Positive Computing Approach Artikel In: International Journal of Social Robotics, 2026. Abstract | BibTeX | Schlagwörter: Fidencio, Aline Xavier; Iossifidis, Ioannis Error-Related Potentials and Reinforcement Learning for Neuroadaptive Systems Proceedings Article In: BC25 : Bernstein Conference 2025,, BCCN Bernstein Network Computational Neuroscience & Neurotechnology , 2025. Abstract | Links | BibTeX | Schlagwörter: BCI, Machine Learning Schmidt, Marie Dominique; Iossifidis, Ioannis Predicting Upper Limb Muscle Activity from Kinematics Using LSTM Networks Proceedings Article In: Bernstein Conference 2025, BCCN Bernstein Network Computational Neuroscience & Neurotechnology , 2025. Abstract | Links | BibTeX | Schlagwörter: BCI Grün, Felix; Iossifidis, Ioannis A Framework to Model Your Model Based / Model Free Action Selection Hypothesis Proceedings Article In: BC25 : Bernstein Conference 2025, , BCCN Bernstein Network Computational Neuroscience & Neurotechnology , 2025. Abstract | Links | BibTeX | Schlagwörter: Lehmler, Stephan Johann; ur Rehman, Muhammad Saif; Iossifidis, Ioannis Activation-Based Indicators of Memorization in ReLU Artificial Neural Networks: A Computational Perspective Proceedings Article In: BC25 : Bernstein Conference 2025, BCCN Bernstein Network Computational Neuroscience & Neurotechnology , 2025. Abstract | Links | BibTeX | Schlagwörter: Machine Learning Saif-ur-Rehman, Muhammad; Ali, Omair; Klaes, Christian; Iossifidis, Ioannis In: Neurocomputing, S. 131370, 2025, ISSN: 0925-2312. Abstract | Links | BibTeX | Schlagwörter: BCI, Brain computer interface, Deep learning, Self organizing, Self-supervised machine learning, Spike Sorting Sziburis, Tim; Blex, Susanne; Glasmachers, Tobias; Iossifidis, Ioannis Hand Motion Catalog of Human Center-Out Transport Trajectories Measured Redundantly in 3D Task-Space Artikel In: Bd. 12, Nr. 1, S. 1293, 2025, ISSN: 2052-4463. Abstract | Links | BibTeX | Schlagwörter: BCI, Biomedical engineering, Motor control, Physiology Erle, Lukas; Hoss, Thomas; Peltzer, Isabel; Eimler, Sabrina C. Artificial Intelligence in Education. AIED 2025., Bd. 15882, Lecture Notes in Computer Science Springer, Cham, 2025, ISBN: 978-3-031-98465-5. Links | BibTeX | Schlagwörter: Fidêncio, Aline Xavier; Grün, Felix; Klaes, Christian; Iossifidis, Ioannis Hybrid Brain-Computer Interface Using Error-Related Potential and Reinforcement Learning Artikel In: Frontiers in Human Neuroscience, Bd. 19, 2025, ISSN: 1662-5161. Abstract | Links | BibTeX | Schlagwörter: adaptive brain-computer interface, BCI, EEG, error-related potentials (ErrPs), Machine Learning, motor imagery (MI), reinforcement learning (RL) Finkel, Marcel; Timm, Lara; Erle, Lukas; Arntz, Alexander; Helgert, André; Straßmann, Carolin; Eimler, Sabrina C. Robot or Employee? Exploring People’s Choice for or Against an Interaction with a Social Robot Proceedings Article In: Proceedings of the International Conference on Social Robotics, S. 446–459, Springer Nature, 2025, ISBN: 978-981-96-3522-1. Abstract | Links | BibTeX | Schlagwörter: Helgert, André; Eimler, Sabrina C.; Gross, Tom A Technical User Study on an Authoring Tool for Simplifying VR Study Setups in HRI Research Proceedings Article In: Proceedings of the 2025 ACM/IEEE International Conference on Human-Robot Interaction, S. 550-558, IEEE Press, 2025. BibTeX | Schlagwörter: Fidêncio, Aline Xavier; Grün, Felix; Klaes, Christian; Iossifidis, Ioannis Error-Related Potential Driven Reinforcement Learning for Adaptive Brain-Computer Interfaces Artikel In: Arxiv, 2025. Abstract | Links | BibTeX | Schlagwörter: BCI, Computer Science - Human-Computer Interaction, Computer Science - Machine Learning, EEG, Quantitative Biology - Neurons and Cognition, Reinforcement learning Baker, Nermeen Abou; Handmann, Uwe Rethinking Model Selection Beyond ImageNet Accuracy for Waste Classification Konferenz International Conference on Pattern Recognition Applications and Methods (ICPRAM 2025), Porto, Portugal, 2025. Links | BibTeX | Schlagwörter: Kohen-Vacs, Dan; Usher, Maya; Jansen, Marc In: International Journal of Artificial Intelligence in Education, 2025. Links | BibTeX | Schlagwörter: Kohen-Vacs, Dan; Usher, Maya; Jansen, Marc Bridging the AI Gap: Developing AI Literacy in Programming Education Proceedings Article In: Looi, Chee-Kit; Santos, Carlos; Pellegrino, Maria Angela; Aresta, Mónica; Vittorini, Pierpaolo; Gennari, Rosella; Mascio, Tania Di; Temperini, Marco; Prieta, Fernando; Nongaillard, Antoine (Hrsg.): Methodologies and Intelligent Systems for Technology Enhanced Learning, 15th International Conference, S. 196–207, Springer Nature Switzerland, Cham, 2025, ISBN: 978-3-032-05070-0. Abstract | BibTeX | Schlagwörter: Pehlke, Marcel; Eudenbach, Cindy; Graw, Maximilian; Jansen, Marc Towards Automated Software Testing: Evaluating LLMs in Generating Effective Test Cases Buchkapitel In: S. 205-217, 2025, ISBN: 978-3-031-95126-8. Links | BibTeX | Schlagwörter: Pehlke, Marcel; Jansen, Marc About Decentralized Insurance. A Blockchain Based Approach with Integrated AI Buchkapitel In: S. 258-267, 2025, ISBN: 978-3-031-81927-8. Links | BibTeX | Schlagwörter: Schmidt, Lambert; Jansen, Marc In: S. 160-169, 2025, ISBN: 978-3-031-81927-8. Links | BibTeX | Schlagwörter: Schulten, Jan; Helgert, Andre; Arntz, Alexander; StraBmann, Carolin; Eimler, Sabrina C. Merging Realities: Exploring Mixed Reality as a Research Tool for Human-Robot Interaction in Real-World Settings Proceedings Article In: 2025 IEEE International Conference on Artificial Intelligence and eXtended and Virtual Reality (AIxVR), S. 147-153, IEEE Computer Society, Los Alamitos, CA, USA, 2025. Abstract | Links | BibTeX | Schlagwörter: Training;Solid modeling;Navigation;Merging;Human-robot interaction;Mixed reality;Virtual reality;Libraries;Usability;Robots Helgert, Andre; Eimler, Sabrina C.; Gross, Tom Beyond Coding: Empowering HRI Researchers with an Authoring Tool for Simplified VR Studies Proceedings Article In: 2025 IEEE International Conference on Artificial Intelligence and eXtended and Virtual Reality (AIxVR), S. 290-295, IEEE Computer Society, Los Alamitos, CA, USA, 2025. Abstract | Links | BibTeX | Schlagwörter: Visualization;Authoring systems;Human-robot interaction;Virtual reality;Programming;Encoding;Artificial intelligence;Robots Helgert, Andre; Weis, Latoya; Strassmann, Carolin Prompt it Colorful with Rainbow Bot: Enhancing Video-Based Collaborative Learning by using a Multi-Party AI-Driven Chatbot Proceedings Article In: Proceedings of the Extended Abstracts of the CHI Conference on Human Factors in Computing Systems, Association for Computing Machinery, New York, NY, USA, 2025, ISBN: 9798400713958. Abstract | Links | BibTeX | Schlagwörter: AI-driven chatbots, Artifical Intelligence, Chatbot, Collaborative Learning, Higher Education, Multi-party AI-driven chatbots Baker, Nermeen Abou; Handmann, Uwe One size does not fit all: Benchmarking modelselection scores for image classification Artikel In: Scientific Reports (Sci Rep), Bd. 14, Nr. 30239, 2024, ISSN: 2045-2322. Links | BibTeX | Schlagwörter: Baker, Nermeen Abou; Rohrschneider, David; Handmann, Uwe Parameter-efficient fine-tuning of large pretrained models for instance segmentation tasks Artikel In: Machine Learning and Knowledge Extraction, Bd. 6, Nr. 4, S. 2783–2807, 2024, ISSN: 2504-4990. Links | BibTeX | Schlagwörter: Sziburis, Tim; Blex, Susanne; Glasmachers, Tobias; Iossifidis, Ioannis Deep-learning-based identification of individual motion characteristics from upper-limb trajectories towards disorder stage evaluation Proceedings Article In: Pons, Jose L.; Tornero, Jesus; Akay, Metin (Hrsg.): Converging Clinical and Engineering Research on Neurorehabilitation V - Proceedings of the 6th International Conference on Neurorehabilitation (ICNR2024), Springer International Publishing, La Granja, Spain, 2024. BibTeX | Schlagwörter: BCI, human arm motion, Motor control Erle, Lukas; Hoss, Thomas; Peltzer, Isabel; Eimler, Sabrina C. Generative AI in Higher Education - Perspectives from Students and Teaching Staff Proceedings Article In: HELMeTO 2024 - Book of Abstracts, S. 173-175, 2024, ISBN: 978-88-99978-67-9. Links | BibTeX | Schlagwörter: Helgert, André; Elstrodt-Wefing, Nadine; Möhring, Michelle; Straßmann, Carolin Integrating Collaborative Video-Based Learning for Transdisciplinary Case Work in Pedagogical and Health-Related Education Proceedings Article In: HELMeTO 2024 - Book of Abstracts, S. 17-19, 2024, ISBN: 978-88-99978-67-9. Links | BibTeX | Schlagwörter: Barenbrock, Julia; Eimler, Sabrina C.; Helgert, André; Straßmann, Carolin All too White? Effects of Anthropomorphism on the Stereotypical Perception of Robot Color Konferenz 2024 33rd IEEE International Conference on Robot and Human Interactive Communication (ROMAN), 2024. Abstract | Links | BibTeX | Schlagwörter: Helgert, André; Erle, Lukas; Langer, Sabrina; Straßmann, Carolin; Eimler, Sabrina C. Towards Understandable Transparency in Human-Robot-Interactions in Public Spaces Konferenz 2024 33rd IEEE International Conference on Robot and Human Interactive Communication (ROMAN), 2024. Links | BibTeX | Schlagwörter: Lehmler, Stephan Johann; Saif-ur-Rehman, Muhammad; Glasmachers, Tobias; Iossifidis, Ioannis In: Neurocomputing, S. 128473, 2024, ISSN: 0925-2312. Abstract | Links | BibTeX | Schlagwörter: Artificial neural networks, Generalization, Machine Learning, Memorization, Poisson process, Stochastic modeling Fidencio, Aline Xavier; Klaes, Christian; Iossifidis, Ioannis Adaptive Brain-Computer Interfaces Based on Error-Related Potentials and Reinforcement Learning Proceedings Article In: BC24 : Computational Neuroscience & Neurotechnology Bernstein Conference 2024, BCCN Bernstein Network Computational Networkvphantom, 2024. Abstract | Links | BibTeX | Schlagwörter: BCI, Machine Learning Grün, Felix; Iossifidis, Ioannis Controversial Opinions on Model Based and Model Free Reinforcement Learning in the Brain Proceedings Article In: BCCN Bernstein Network Computational Networkvphantom, 2024. Abstract | Links | BibTeX | Schlagwörter: Machine Learning, Reinforcement learning Schmidt, Marie Dominique; Iossifidis, Ioannis Decoding Upper Limb Movements Proceedings Article In: BCCN Bernstein Network Computational Networkvphantom, 2024. Abstract | Links | BibTeX | Schlagwörter: BCI, Machine Learning, Muscle activity Lehmler, Stephan Johann; Iossifidis, Ioannis Stochastic Process Model Derived Indicators of Overfitting for Deep Architectures: Applicability to Small Sample Recalibration of sEMG Decoders Proceedings Article In: BC24 : Computational Neuroscience & Neurotechnology Bernstein Conference 2024, BCCN Bernstein Network Computational Networkvphantom, 2024. Abstract | Links | BibTeX | Schlagwörter: Machine Learning Pilacinski, Artur; Christ, Lukas; Boshoff, Marius; Iossifidis, Ioannis; Adler, Patrick; Miro, Michael; Kuhlenkötter, Bernd; Klaes, Christian In: Frontiers in Neurorobotics, Bd. 18, 2024, ISSN: 1662-5218. Links | BibTeX | Schlagwörter: BCI, EEG, Human action recognition, human-robot collaboration, Sensor Fusion Lehmler, Stephan Johann; Iossifidis, Ioannis 3D Movement Analysis of the Ruhr Hand Motion Catalog of Human Center-Out Transport Trajectories Proceedings Article In: BC24 : Computational Neuroscience & Neurotechnology Bernstein Conference 2024, BCCN Bernstein Network Computational Networkvphantom, 2024. Abstract | Links | BibTeX | Schlagwörter: Helgert, André; Straßmann, Carolin; Eimler, Sabrina C. Conceptualizing and Designing a Virtual Reality Authoring Tool for Human-Robot Interaction Studies - Learnings and Guidance from Expert Interviews Proceedings Article In: ACM, (Hrsg.): MuC '24: Proceedings of Mensch und Computer 2024, S. 331-341, 2024. Links | BibTeX | Schlagwörter: Fidêncio, Aline Xavier; Klaes, Christian; Iossifidis, Ioannis A Generic Error-Related Potential Classifier Based on Simulated Subjects Artikel In: Frontiers in Human Neuroscience, Bd. 18, S. 1390714, 2024, ISSN: 1662-5161. Abstract | Links | BibTeX | Schlagwörter: adaptive brain-machine (computer) interface, BCI, EEG, Error-related potential (ErrP), ErrP classifier, Generic decoder, Machine Learning, SEREEGA, Simulation Ali, Omair; Saif-ur-Rehman, Muhammad; Metzler, Marita; Glasmachers, Tobias; Iossifidis, Ioannis; Klaes, Christian GET: A Generative EEG Transformer for Continuous Context-Based Neural Signals Artikel In: arXiv:2406.03115 [q-bio], 2024. Abstract | Links | BibTeX | Schlagwörter: BCI, EEG, Machine Learning, Quantitative Biology - Neurons and Cognition Straßmann, Carolin; Eudenbach, Cindy; Arntz, Alexander; Eimler, Sabrina C. "Don't Judge a Book by its Cover": Exploring Discriminatory Behavior in Multi-User-Robot Interaction Konferenz HRI '24: Companion of the 2024 ACM/IEEE International Conference on Human-Robot Interaction
, 2024. Abstract | Links | BibTeX | Schlagwörter: Arntz, Alexander; Dia, Agostino Di; Riebner, Tim; Straßmann, Carolin; Eimler, Sabrina C. Teamwork Makes the Dream Work: A Virtual Reality-based Human-Robot Collaboration Sandbox Simulating Multiple Teams Proceedings Article In: 2024 IEEE International Conference on Artificial Intelligence and eXtended and Virtual Reality (AIxVR), S. 335-339, 2024, ISSN: 2771-7453. Abstract | Links | BibTeX | Schlagwörter: Robot kinematics;Virtual assistants;Virtual environments;Industrial robots;Libraries;Teamwork;Task analysis;Human-Robot Collaboration;Virtual Reality;Machine Learning;Artificial Intelligence Jansen, Marc; Karbach, Lars SFinding Secure Arbitrage Trades in Different Exchange Architectures booktitle = Blockchain and Cryptocurrency, Vol. 2, Issue 1, February 2024 Proceedings Article In: S. 40-50, 2024, ISSN: 2938-2602. BibTeX | Schlagwörter: Büttner, Sabine; Handmann, Uwe; Irrek, Wolfgang Transformation zur Circular Economy - Kleine und mittlere Unternehmen im Wandel begleiten Buch Springer, 2024. Links | BibTeX | Schlagwörter: Arntz, Alexander Enabling Safe Empirical Studies for Human-Robot Collaboration: Implementation of a Sensor Array Driven Control Interface Proceedings Article In: Kurosu, Masaaki; Hashizume, Ayako (Hrsg.): Human-Computer Interaction, S. 42–57, Springer Nature Switzerland, Cham, 2024, ISBN: 978-3-031-60412-6. Abstract | BibTeX | Schlagwörter: Jansen, Marc; Schmidt, Lambert (Hrsg.) Software Engineering Meets Large Language Models Buch BoD – Books on Demand, Norderstedt, 2024, ISBN: 9783759759535. BibTeX | Schlagwörter: 2026

@inproceedings{schmidtSpatialTemporalResolution2026,
title = {The Spatial and~Temporal Resolution of~Motor Intention in~Multi-target Prediction},
author = {Marie D. Schmidt and Ioannis Iossifidis},
editor = {Philipp Neumann and Michael J. Puma and Michael H. Lees and Derek Groen and Jack J. Dongarra and Peter M. A. Sloot},
doi = {10.1007/978-3-032-29924-6_36},
isbn = {978-3-032-29924-6},
year = {2026},
date = {2026-06-27},
urldate = {2026-06-27},
booktitle = {Computational Science – ICCS 2026},
pages = {421–428},
publisher = {Springer Nature Switzerland},
address = {Cham},
abstract = {Reaching, grasping, and object manipulation are essential motor functions in everyday life. This study predicts movement direction and target location from multichannel electromyography (EMG) signals, examining how spatially and temporally accurate intentions can be detected relative to movement onset. A computational pipeline combining data-driven temporal segmentation with Random Forest model is applied to EMG data across planning, execution, and contact phases of a reaching task.},
keywords = {BCI, EMG, HMI, Motor control, Random Forest},
pubstate = {published},
tppubtype = {inproceedings}
}
@inproceedings{xavierfidencioPerformanceBoundariesBrainComputer2026,
title = {Performance Boundaries for~Brain-Computer Interfaces Using Error-Related Potentials and~Reinforcement Learning},
author = {Aline Xavier Fidêncio and Felix Grün and Christian Klaes and Ioannis Iossifidis},
editor = {Giuseppe Nicosia and Varun Ojha and Sven Giesselbach and M. Panos Pardalos and Renato Umeton and La Malfa Emanuele and La Malfa Gabriele},
doi = {10.1007/978-3-032-21480-5_23},
isbn = {978-3-032-21480-5},
year = {2026},
date = {2026-06-01},
urldate = {2026-06-01},
booktitle = {Machine Learning, Optimization, and Data Science},
pages = {335–349},
publisher = {Springer Nature Switzerland},
address = {Cham},
abstract = {Non-invasive brain-computer interfaces (BCIs) can improve quality of life for individuals with motor disabilities. However, input data non-stationarity often leads to performance degradation over time. Adaptive BCIs aim to address this challenge. Recent studies have proposed leveraging error-related potentials (ErrPs) - neural signals elicited during self-made or observed errors - as a natural feedback mechanism for closed-loop systems. While these approaches demonstrate potential performance gains, their effectiveness relies heavily on accurate ErrP detection, which remains challenging. In a previous study, we introduced a novel reinforcement learning-based BCI framework incorporating ErrPs as reward signals. We systematically examine how misclassification rates in ErrP detection in terms of false positives (FPs) and false negatives (FNs) influence closed-loop performance. We use both synthetic and real datasets to evaluate two contextual bandit algorithms (LinUCB and NeuralUCB), trained to map motor imagery-related time-frequency modulations to actions in a binary task. Firstly, our findings show that the sensitivity of agents to FPs and FNs depends on baseline accuracies. In some conditions, such as insufficient exploration, false negatives might be more detrimental than false positives, but this needs further investigation. Proper agent parametrization and enough data samples can compensate the negative effects to some extent.},
keywords = {adaptive brain-computer interface, BCI, electroencephalography (EEG), error-related potentials (ErrPs), Machine Learning, motor imagery (MI), reinforcement learning (RL)},
pubstate = {published},
tppubtype = {inproceedings}
}
@inproceedings{lehmlerDistributionalPropertiesReLUActivations2026,
title = {Distributional Properties of~ReLU-Activations in~Artificial Neural Networks That~Learn by~Memorization},
author = {Stephan Johann Lehmler and Muhammad Saif-ur-Rehman and Tobias Glasmachers and Ioannis Iossifidis},
editor = {Giuseppe Nicosia and Varun Ojha and Sven Giesselbach and M. Panos Pardalos and Renato Umeton and La Malfa Emanuele and La Malfa Gabriele},
doi = {10.1007/978-3-032-21477-5_27},
isbn = {978-3-032-21477-5},
year = {2026},
date = {2026-06-01},
urldate = {2026-06-01},
booktitle = {Machine Learning, Optimization, and Data Science},
pages = {410–423},
publisher = {Springer Nature Switzerland},
address = {Cham},
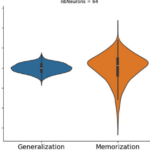
abstract = {We investigate the distributional properties of layers in Artificial Neural Network (ANN) that can be used to distinguish between networks learning by generalization and memorizing networks. Starting from the notion of memorization being essentially definable as learning ‘rare’ features of the input data, we propose the activation probability of Rectified Linear Units (ReLU)-neurons as an important indicator of memorization. Building on this idea, we show how hypotheses about distributional properties over whole networks structures can be derived from the activation probability of singular neurons in memorizing ANNs. We such extend previous work on using Poisson process models of activations in ANN by considering the correlation between neurons. Using this approach, we further simulate the effect of memorizing neurons on distributional properties of weight matrices and activation magnitudes and find a connection between L1/L2-norm regularization of weight matrices. We empirically evaluate the distributions of activation rate, correlation structure and weight matrices in memorizing and generalizing ANNs on a simple MNIST-classification task. Our initial findings show how the activation frequency and intra-layer correlation structure can be used to distinguish generalizing from memorizing networks and for inferring distributional properties on affected parts of the networks. This work presents a building block to later derive online metrics for memorization in ANNs.},
keywords = {Artificial neural networks, BCI, Machine Learning, Memorization, Statistical Modeling},
pubstate = {published},
tppubtype = {inproceedings}
}
@inproceedings{grunInvarianceQuantileSelection2026,
title = {Invariance to~Quantile Selection in~Distributional Continuous Control},
author = {Felix Grün and Muhammad Saif-ur-Rehman and Tobias Glasmachers and Ioannis Iossifidis},
editor = {Giuseppe Nicosia and Varun Ojha and Sven Giesselbach and M. Panos Pardalos and Renato Umeton and La Malfa Emanuele and La Malfa Gabriele},
doi = {10.1007/978-3-032-21477-5_12},
isbn = {978-3-032-21477-5},
year = {2026},
date = {2026-06-01},
urldate = {2026-06-01},
booktitle = {Machine Learning, Optimization, and Data Science},
pages = {175–190},
publisher = {Springer Nature Switzerland},
address = {Cham},
abstract = {In recent years, distributional reinforcement learning has produced many state-of-the-art results in typical reinforcement learning benchmarks, such as the suite of Atari games. Increasingly sample-efficient distributional algorithms for the discrete action domain have been developed over time, which vary primarily in the way they parameterize their approximations of value distributions, and how they quantify the differences between those distributions. In this work, we transfer three of those algorithms - Quantile Regression Deep Q-Network (QR-DQN), Implicit Quantile Networks (IQN) and Fully Parameterized Quantile Function (FQF) - to the continuous action domain by extending two powerful actor-critic algorithms - Twin Delayed Deep Deterministic policy gradient (TD3) and Soft Actor-Critic (SAC) - with distributional critics. We investigate whether the relative performance of the methods for the discrete action space translates to the continuous case. To that end, we compare them empirically on a set of continuous control tasks (Ant, HalfCheetah, Hopper, Humanoid and Walker2D). Our results indicate qualitative invariance regarding the number and placement of distributional atoms in the deterministic, continuous action setting.},
keywords = {Actor-critic, BCI, Continuous control, Distributional reinforcement learning, Machine Learning, Quantile regression, reinforcement learning (RL)},
pubstate = {published},
tppubtype = {inproceedings}
}
@article{schmidt2026spatialtemporalresolutionmotor,
title = {The Spatial and Temporal Resolution of Motor Intention in Multi-Target Prediction},
author = {Marie Dominique Schmidt and Ioannis Iossifidis},
url = {https://arxiv.org/abs/2603.05418},
doi = {https://doi.org/10.48550/arXiv.2603.05418},
year = {2026},
date = {2026-03-05},
urldate = {2026-03-05},
journal = {arXiv:2603.05418 [q-bio.NC]},
abstract = {Reaching for grasping, and manipulating objects are essential motor functions in everyday life. Decoding human motor intentions is a central challenge for rehabilitation and assistive technologies. This study focuses on predicting intentions by inferring movement direction and target location from multichannel electromyography (EMG) signals, and investigating how spatially and temporally accurate such information can be detected relative to movement onset. We present a computational pipeline that combines data-driven temporal segmentation with classical and deep learning classifiers in order to analyse EMG data recorded during the planning, early execution, and target contact phases of a delayed reaching task.
Early intention prediction enables devices to anticipate user actions, improving responsiveness and supporting active motor recovery in adaptive rehabilitation systems. Random Forest achieves 80% accuracy and Convolutional Neural Network 75% accuracy across 25 spatial targets, each separated by 14∘ azimuth/altitude. Furthermore, a systematic evaluation of EMG channels, feature sets, and temporal windows demonstrates that motor intention can be efficiently decoded even with drastically reduced data. This work sheds light on the temporal and spatial evolution of motor intention, paving the way for anticipatory control in adaptive rehabilitation systems and driving advancements in computational approaches to motor neuroscience.},
keywords = {BCI, Machine Learning, Motor control},
pubstate = {published},
tppubtype = {article}
}
Early intention prediction enables devices to anticipate user actions, improving responsiveness and supporting active motor recovery in adaptive rehabilitation systems. Random Forest achieves 80% accuracy and Convolutional Neural Network 75% accuracy across 25 spatial targets, each separated by 14∘ azimuth/altitude. Furthermore, a systematic evaluation of EMG channels, feature sets, and temporal windows demonstrates that motor intention can be efficiently decoded even with drastically reduced data. This work sheds light on the temporal and spatial evolution of motor intention, paving the way for anticipatory control in adaptive rehabilitation systems and driving advancements in computational approaches to motor neuroscience.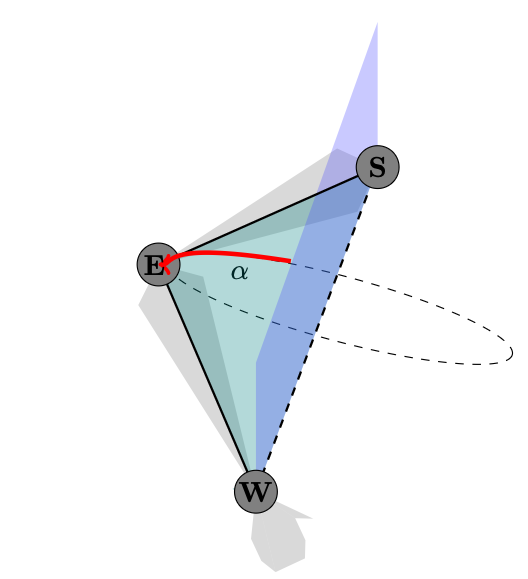
@article{schmidtInsightsMotorControl2026,
title = {Insights into Motor Control: Predict Muscle Activity from Upper Limb Kinematics with LSTM Networks},
author = {Marie D. Schmidt and Tobias Glasmachers and Ioannis Iossifidis},
editor = {Nature Publishing Group},
url = {https://www.nature.com/articles/s41598-025-33696-y},
doi = {10.1038/s41598-025-33696-y},
issn = {2045-2322},
year = {2026},
date = {2026-01-05},
urldate = {2026-01-05},
journal = {Nature Scientific Reports},
publisher = {Nature Publishing Group},
abstract = {This study explores the relationship between upper limb kinematics and corresponding muscle activity, aiming to understand how predictive models can approximate motor control. We employ a Long Short-Term Memory (LSTM) network trained on kinematic end effector data to estimate muscle activity for eight muscles. The model exhibits strong predictive accuracy for new repetitions of known movements and generalizes to unseen movements, suggesting it captures underlying biomechanical principles rather than merely memorizing patterns. This generalization is particularly valuable for applications in rehabilitation and human-machine interaction, as it reduces the need for exhaustive datasets. To further investigate movement representation and learning, we analyze the impact of motion segmentation, hypothesizing that breaking movements into simpler components may improve model performance. Additionally, we explore the role of the swivel angle in reducing redundancy in arm kinematics. Another key focus is the effect of training data complexity on generalization. Specifically, we assess whether training on a diverse set of movements leads to better performance than specializing in either simple, single-joint movements or complex, multi-joint movements. The study is based on an experimental setup involving 23 distinct upper limb movements performed by five subjects. Our findings provide insights into the interplay between kinematics and muscle activity, contributing to motor control research and advancing neural network-based movement prediction.},
keywords = {BCI, Computational biology and bioinformatics, Motor control, Neuroscience},
pubstate = {published},
tppubtype = {article}
}
@article{nokey,
title = {Need Satisfaction in Human-Robot Interaction in Public Spaces – A Positive Computing Approach},
author = {Marcel Finkel and Lukas Erle and Lara Timm and Alexander Arntz and André Helgert and Carolin Straßmann and Sabrina C. Eimler},
year = {2026},
date = {2026-01-01},
journal = {International Journal of Social Robotics},
abstract = {The use of social robots in public facilities is increasingly being considered to reduce employees’ workload and requires citizens to engage in human-robot interactions. Based on the paradigm of Positive Computing, the motivation to interact with robots can be supported by increasing citizens’ well-being during the interaction. According to Self-determination Theory, this well-being depends on the satisfaction of people’s basic psychological needs for autonomy, competence, and relatedness. However, a lack of research exists on the abilities of publicly used robots to address these needs, particularly regarding diverse audiences. To address this research gap, a field study was conducted in two public libraries (N = 65), in which participants interacted with a social robot that recommended books and read passages from them aloud. Results reveal that people’s general attitudes toward robots were positively related to how well the robot satisfied needs for autonomy, competence, and relatedness and showed that women felt less competent in the interaction than men. Interview data complement these findings by showing that insufficient responses and the robot’s rigid way of interacting are connected to a reduced perception of users’ competence. In contrast, a successful, easy interaction and responses to user input were described as reasons for increased perceptions of competence and autonomy, while relatedness was experienced as a difficult concept to grasp. Overall, these findings show that social robots in public places can satisfy users’ basic psychological needs and that user- and robot-related characteristics influence this satisfaction.},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
2025
@inproceedings{xavierfidencioErrorrelatedPotentialsReinforcement2025,
title = {Error-Related Potentials and Reinforcement Learning for Neuroadaptive Systems},
author = {Aline Xavier Fidencio and Ioannis Iossifidis},
url = {https://abstracts.g-node.org/conference/BC25/abstracts#/uuid/84a56344-585c-4d7c-992d-1f34489770f5},
year = {2025},
date = {2025-10-01},
urldate = {2025-10-01},
booktitle = {BC25 : Bernstein Conference 2025,},
publisher = {BCCN Bernstein Network Computational Neuroscience & Neurotechnology },
abstract = {Error-related potentials (ErrPs) represent the neural signature of error processing in the brain and numerous studies have demonstrated their reliable detection using non-invasive techniques such as electroencephalography (EEG). Over recent decades, the brain-computer interface (BCI) community has shown growing interest in leveraging these intrinsic feedback signals to enhance system performance. However, the effective use of ErrPs in a closed-loop setup crucially depends on accurate single-trial detection, which is typically achieved using a subject-specific classifier (or decoder) trained on samples recorded during extensive calibration sessions before the BCI system can be deployed. In our research, we explore the potential of simulated EEG data for training a truly generic ErrP classifier. Utilizing the SEREEGA simulator, we demonstrate that EEG data can be generated in a cost-effective manner, allowing for controlled and systematic variations in data distribution to accommodate uncertainties in ErrP generation. A classifier trained solely on the generated data exhibits promising generalization capabilities across different datasets and performs comparably to a leave-one-subject-out approach trained on real data (Xavier Fidêncio et al., 2024). In our experiments, we deliberately provoked ErrPs when the BCI misinterpreted the user's intention, resulting in incorrect actions. Subjects engaged in a game controlled via keyboard and/or motor imagery (imagining hand movements), with EEG data recorded using various EEG systems for comparison. Considering the challenges in obtaining clear ErrP signals for all subjects and the limitations identified in existing literature (Xavier Fidêncio et al., 2022), we hypothesize whether a measurable error signal is consistently generated at the scalp level when subjects encounter erroneous conditions, and how this influences closed-loop setups that incorporate ErrPs for improved BCI performance. To address these questions, we assess the effects of the occurrence-to-detection ratio of ErrPs in the classification pipeline using simulated data and explore the impact of error misclassification rates in an ErrP-based learning framework, which employs reinforcement learning to enhance BCI performance.},
keywords = {BCI, Machine Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
@inproceedings{schmidtPredictingUpperLimb2025,
title = {Predicting Upper Limb Muscle Activity from Kinematics Using LSTM Networks},
author = {Marie Dominique Schmidt and Ioannis Iossifidis},
url = {https://abstracts.g-node.org/conference/BC25/abstracts#/uuid/a8fa799f-bf8e-4192-8ba9-3b1e3ad078ea},
year = {2025},
date = {2025-10-01},
urldate = {2025-10-01},
booktitle = {Bernstein Conference 2025},
publisher = {BCCN Bernstein Network Computational Neuroscience & Neurotechnology },
abstract = {The upper limbs are essential for performing everyday tasks that require a wide range of motion and precise coordination. Planning and timing are crucial to achieve coordinated movement. Sensory information about the target and current body state is critical, as is the integration of prior experience represented by prelearned inverse dynamics that generate the associated muscle activity. We propose a generative model that uses a recurrent neural network to predict upper limb muscle activity during various simple and complex everyday movements. By identifying movement primitives within the signal, our model enables the decomposition of these movements into a fundamental set, facilitating the reconstruction of muscle activity patterns. Our approach has implications for the fundamental understanding of movement control and the rehabilitation of neuromuscular disorders with myoelectric prosthetics and functional electrical stimulation.},
keywords = {BCI},
pubstate = {published},
tppubtype = {inproceedings}
}
@inproceedings{grunFrameworkModelYour2025,
title = {A Framework to Model Your Model Based / Model Free Action Selection Hypothesis},
author = {Felix Grün and Ioannis Iossifidis},
url = {https://abstracts.g-node.org/conference/BC25/abstracts#/uuid/e3090016-2d82-4107-b587-1474f97be0b3},
year = {2025},
date = {2025-10-01},
urldate = {2025-10-01},
booktitle = {BC25 : Bernstein Conference 2025, },
publisher = {BCCN Bernstein Network Computational Neuroscience & Neurotechnology },
abstract = {Dopaminergic Reward Prediction Errors (RPEs) are a key motivation and inspiration for model free, temporal difference reinforcement learning methods. Originally, the correlation of RPEs with model free temporal difference errors was seen as a strong indicator for model free reinforcement learning in brains. The standard view was that model free learning is the norm and more computationally expensive model based decision-making is only used when it leads to outcomes that are good enough to justify the additional effort. Nowadays, the landscape of opinions, models and experimental evidence, both electrophysiological and behavioral, paints a more complex picture, including but not limited to mechanisms of arbitration between the two systems. Model based learning or hybrid models better capture experimental behavioral data, and model based signatures are found in RPEs that were previously thought to be model free or hybrid [1]. The evidence for clearly model free learning is scarce [2]. On the other hand, multiple approaches show how model based behavior and RPEs can be produced with fundamentally model free reinforcement learning methods [3, 4, 5]. We point out findings that seem to contradict each other, others that complement each other, speculate which ideas are compatible with each other and give our opinions on ways forward, towards understanding if and how model based and model free learning from rewards coexist and interact in the brain.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
@inproceedings{lehmlerActivationBasedIndicatorsMemorization2025,
title = {Activation-Based Indicators of Memorization in ReLU Artificial Neural Networks: A Computational Perspective},
author = {Stephan Johann Lehmler and Muhammad Saif ur Rehman and Ioannis Iossifidis},
url = {https://abstracts.g-node.org/conference/BC25/abstracts#/uuid/cfc1121c-9d2c-4017-a781-15e9ec615053},
year = {2025},
date = {2025-09-30},
urldate = {2025-09-30},
booktitle = {BC25 : Bernstein Conference 2025},
publisher = {BCCN Bernstein Network Computational Neuroscience & Neurotechnology },
abstract = {Our recent work presents a stochastic process model of the activations within an ANN and shows a promising indicator to distinguish memorizing from generalizing ANNs. The average λ, or mean firing rate (MFR), of a hidden layer, shows stable differences between memorizing and generalizing networks, comparatively independent of the underlying data used for evaluation. We first show the performance of this indicator during training on benchmark computer vision datasets such as MNIST and CIFAR-10. In a second step, we extend the work to the real-life use case of calibrating a pre-trained model to a new user. We focus on decoding surface electromyographic (sEMG) signals, which are highly variable within and between users, and therefore necessitate frequent user calibration. Especially in situations when user calibration has to only rely on a small number of samples, degradation in performance overtime due to memorization and overfitting is a not unlikely outcome. In those cases, traditional regularization methods that function by observing the performance on a validation set, such as early stopping, don’t necessarily work, because they are evaluated on data from the same subject and set of movements, which features are being memorized. Our new indicators of memorization could help as stable indicators for model performance and give live insights during model calibration when more samples from the new users would be necessary. We evaluate the usefulness of the MFR-indicator for identifying the moment a pre-trained sEMG decoder starts to memorize given inputs},
keywords = {Machine Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
@article{saif-ur-rehmanAdaptiveSpikeDeepclassifierSelforganizing2025,
title = {Adaptive SpikeDeep-classifier: Self-organizing and Self-Supervised Machine Learning Algorithm for Online Spike Sorting},
author = {Muhammad Saif-ur-Rehman and Omair Ali and Christian Klaes and Ioannis Iossifidis},
editor = {Elsevier},
url = {https://www.sciencedirect.com/science/article/pii/S0925231225020429},
doi = {10.1016/j.neucom.2025.131370},
issn = {0925-2312},
year = {2025},
date = {2025-09-04},
urldate = {2025-09-04},
journal = {Neurocomputing},
pages = {131370},
abstract = {Objective. Invasive brain-computer interface (BCI) research is progressing towards the realization of the motor skills rehabilitation of severely disabled patients in the real world. The size of invasive micro-electrode arrays and the selection of an efficient online spike sorting algorithm (performing spike sorting at run time) are two key factors that play pivotal roles in the successful decoding of the user’s intentions. The process of spike sorting includes the selection of channels that record the spike activity (SA) and determines the SA of different sources (neurons), on selected channels individually. The neural data recorded with dense micro-electrode arrays is time-varying and often contaminated with non-stationary noise. Unfortunately, current state-of-the-art spike sorting algorithms are incapable of handling the massively increasing amount of time-varying data resulting from the dense microelectrode arrays, which makes the spike sorting one of the fragile components of the online BCI decoding framework. Approach. This study proposed an adaptive and self-organized algorithm for online spike sorting, named as Adaptive SpikeDeep-Classifier (Ada-SpikeDeepClassifier). Our algorithm uses SpikeDeeptector for the channel selection, an adaptive background activity rejector (Ada-BAR) for discarding the background events, and an adaptive spike deep-classifier (Ada-SpikeDeepClassifier) for classifying the SA of different neural units. The process of spike sorting is accomplished by concatenating SpikeDeeptector, Ada-BAR and Ada-SpikeDeepclassifier. Results. The proposed algorithm is evaluated on two different categories of data: a human data-set recorded in our lab, and a publicly available simulated data-set to avoid subjective biases and labeling errors. The proposed Ada-SpikeDeepClassifier outperformed our previously published SpikeDeep-Classifier and eight conventional spike sorting algorithms and produce comparable results to state of the art deep learning based algorithms. Significance. To the best of our knowledge, the proposed algorithm is the first spike sorting algorithm that autonomously adapts to the shift in the distribution of noise and SA data and perform spike sorting without human interventions in various kinds of experimental settings. In addition, the proposed algorithm builds upon artificial neural networks, which makes it an ideal candidate for being embedded on neuromorphic chips that are also suitable for wearable invasive BCI.},
keywords = {BCI, Brain computer interface, Deep learning, Self organizing, Self-supervised machine learning, Spike Sorting},
pubstate = {published},
tppubtype = {article}
}
@article{sziburisHandMotionCatalog2025,
title = {Hand Motion Catalog of Human Center-Out Transport Trajectories Measured Redundantly in 3D Task-Space},
author = {Tim Sziburis and Susanne Blex and Tobias Glasmachers and Ioannis Iossifidis},
editor = {Nature},
url = {https://www.nature.com/articles/s41597-025-05576-7},
doi = {10.1038/s41597-025-05576-7},
issn = {2052-4463},
year = {2025},
date = {2025-07-24},
urldate = {2025-07-24},
volume = {12},
number = {1},
pages = {1293},
publisher = {Nature Publishing Group},
abstract = {Motion modeling and variability analysis bear the potential to identify movement pathology but require profound data. We introduce a systematic dataset of 3D center-out task-space trajectories of human hand transport movements in a standardized setting. This set-up is characterized by reproducibility, leading to reliable transferability to various locations. The transport tasks consist of grasping a cylindrical object from a unified start position and transporting it to one of nine target locations in unconstrained operational space. The measurement procedure is automatized to record ten trials per target location and participant. The dataset comprises 90 movement trajectories for each hand of 31 participants without known movement disorders (21 to 78 years), resulting in 5580 trials. In addition, handedness is determined using the EHI. Data are recorded redundantly and synchronously by an optical tracking system and a single IMU sensor. Unlike the stationary capturing system, the IMU can be considered a portable, low-cost, and energy-efficient alternative to be implemented on embedded systems, for example in medical evaluation scenarios.},
keywords = {BCI, Biomedical engineering, Motor control, Physiology},
pubstate = {published},
tppubtype = {article}
}
@conference{nokey,
title = {Opportunities and Challenges of Generative AI in Education Through the Eyes of Students and Educators: A Qualitative Interview Approach},
author = {Lukas Erle and Thomas Hoss and Isabel Peltzer and Sabrina C. Eimler},
url = {https://doi.org/10.1007/978-3-031-98465-5_40},
doi = {https://doi.org/10.1007/978-3-031-98465-5_40},
isbn = {978-3-031-98465-5},
year = {2025},
date = {2025-07-20},
booktitle = {Artificial Intelligence in Education. AIED 2025.},
volume = {15882},
pages = {316-323},
publisher = {Springer, Cham},
series = {Lecture Notes in Computer Science},
keywords = {},
pubstate = {published},
tppubtype = {conference}
}
@article{xavierfidencioHybridBraincomputerInterface2025,
title = {Hybrid Brain-Computer Interface Using Error-Related Potential and Reinforcement Learning},
author = {Aline Xavier Fidêncio and Felix Grün and Christian Klaes and Ioannis Iossifidis},
editor = {Frontiers},
url = {https://www.frontiersin.org/journals/human-neuroscience/articles/10.3389/fnhum.2025.1569411/full},
doi = {10.3389/fnhum.2025.1569411},
issn = {1662-5161},
year = {2025},
date = {2025-06-04},
urldate = {2025-06-04},
journal = {Frontiers in Human Neuroscience},
volume = {19},
publisher = {Frontiers},
abstract = {Brain-computer interfaces (BCIs) offer alternative communication methods for individuals with motor disabilities, aiming to improve their quality of life through external device control. However, non-invasive BCIs using electroencephalography (EEG) often suffer from performance limitations due to non-stationarities arising from changes in mental state or device characteristics. Addressing these challenges motivates the development of adaptive systems capable of real-time adjustment. This study investigates a novel approach for creating an adaptive, error-related potential (ErrP)-based BCI using reinforcement learning (RL) to dynamically adapt to EEG signal variations. The framework was validated through experiments on a publicly available motor imagery dataset and a novel fast-paced protocol designed to enhance user engagement. Results showed that RL agents effectively learned control policies from user interactions, maintaining robust performance across datasets. However, findings from the game-based protocol revealed that fast-paced motor imagery tasks were ineffective for most participants, highlighting critical challenges in real-time BCI task design. Overall, the results demonstrate the potential of RL for enhancing BCI adaptability while identifying practical constraints in task complexity and user responsiveness.},
keywords = {adaptive brain-computer interface, BCI, EEG, error-related potentials (ErrPs), Machine Learning, motor imagery (MI), reinforcement learning (RL)},
pubstate = {published},
tppubtype = {article}
}
@inproceedings{nokeyo,
title = {Robot or Employee? Exploring People’s Choice for or Against an Interaction with a Social Robot},
author = {Marcel Finkel and Lara Timm and Lukas Erle and Alexander Arntz and André Helgert and Carolin Straßmann and Sabrina C. Eimler},
url = {https://link.springer.com/chapter/10.1007/978-981-96-3522-1_38},
doi = {https://doi.org/10.1007/978-981-96-3522-1_38},
isbn = {978-981-96-3522-1},
year = {2025},
date = {2025-03-25},
urldate = {2024-11-01},
booktitle = {Proceedings of the International Conference on Social Robotics},
pages = {446–459},
publisher = {Springer Nature},
abstract = {Employing social robots in public spaces to support employees at work is a frequently discussed scenario. However, the success of robotic systems often depends on people’s willingness to initiate interactions with them. This makes understanding people’s usage decisions crucial, yet only limited research has been done on why people select publicly accessible social robots over alternatives, such as human employees. Amongst various factors, people’s diversity characteristics are likely to influence this decision, such as people’s locus of control when using technology and their self-efficacy in human-robot interaction. To investigate this choice for or against using a robot, a field study (N = 65) was conducted in two public libraries in the Ruhr area (Germany). Participants had to decide to interact with a robot or an employee and were subsequently asked to explain their decision via a questionnaire and an interview. Results reveal that the decision could neither be explained by people’s locus of control when using technology nor by other diversity characteristics. Furthermore, no significant differences in self-efficacy in human-robot interaction between users who chose the robot instead of the human employee were found. Finally, the qualitative findings point to general interest in robots and people’s differences in dealing with novelty as reasons for their choice. Overall, our findings offer insights into the decision for or against the usage of a robot, which are relevant to both, research and the deployment of social robots in public spaces.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
@inproceedings{nokeyn,
title = {A Technical User Study on an Authoring Tool for Simplifying VR Study Setups in HRI Research},
author = {André Helgert and Sabrina C. Eimler and Tom Gross},
year = {2025},
date = {2025-03-03},
urldate = {2025-03-03},
booktitle = {Proceedings of the 2025 ACM/IEEE International Conference on Human-Robot Interaction},
pages = {550-558},
publisher = {IEEE Press},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
@article{fidencioErrorrelatedPotentialDriven2025,
title = {Error-Related Potential Driven Reinforcement Learning for Adaptive Brain-Computer Interfaces},
author = {Aline Xavier Fidêncio and Felix Grün and Christian Klaes and Ioannis Iossifidis},
url = {http://arxiv.org/abs/2502.18594},
doi = {10.48550/arXiv.2502.18594},
year = {2025},
date = {2025-02-25},
urldate = {2025-02-25},
journal = {Arxiv},
abstract = {Brain-computer interfaces (BCIs) provide alternative communication methods for individuals with motor disabilities by allowing control and interaction with external devices. Non-invasive BCIs, especially those using electroencephalography (EEG), are practical and safe for various applications. However, their performance is often hindered by EEG non-stationarities, caused by changing mental states or device characteristics like electrode impedance. This challenge has spurred research into adaptive BCIs that can handle such variations. In recent years, interest has grown in using error-related potentials (ErrPs) to enhance BCI performance. ErrPs, neural responses to errors, can be detected non-invasively and have been integrated into different BCI paradigms to improve performance through error correction or adaptation. This research introduces a novel adaptive ErrP-based BCI approach using reinforcement learning (RL). We demonstrate the feasibility of an RL-driven adaptive framework incorporating ErrPs and motor imagery. Utilizing two RL agents, the framework adapts dynamically to EEG non-stationarities. Validation was conducted using a publicly available motor imagery dataset and a fast-paced game designed to boost user engagement. Results show the framework's promise, with RL agents learning control policies from user interactions and achieving robust performance across datasets. However, a critical insight from the game-based protocol revealed that motor imagery in a high-speed interaction paradigm was largely ineffective for participants, highlighting task design limitations in real-time BCI applications. These findings underscore the potential of RL for adaptive BCIs while pointing out practical constraints related to task complexity and user responsiveness.},
keywords = {BCI, Computer Science - Human-Computer Interaction, Computer Science - Machine Learning, EEG, Quantitative Biology - Neurons and Cognition, Reinforcement learning},
pubstate = {published},
tppubtype = {article}
}
@conference{ICPRAM-BakHan2025,
title = {Rethinking Model Selection Beyond ImageNet Accuracy for Waste Classification},
author = {Nermeen Abou Baker and Uwe Handmann},
url = {https://icpram.scitevents.org/},
year = {2025},
date = {2025-02-01},
booktitle = {International Conference on Pattern Recognition Applications and Methods (ICPRAM 2025)},
address = {Porto, Portugal},
keywords = {},
pubstate = {published},
tppubtype = {conference}
}
@article{Kohen-VacsAIinEducation25,
title = {Integrating Generative AI into Programming Education: Student Perceptions and the Challenge of Correcting AI Errors},
author = {Dan Kohen-Vacs and Maya Usher and Marc Jansen},
doi = {10.1007/s40593-025-00496-4},
year = {2025},
date = {2025-01-01},
journal = {International Journal of Artificial Intelligence in Education},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
@inproceedings{10.1007/978-3-032-05070-0_18,
title = {Bridging the AI Gap: Developing AI Literacy in Programming Education},
author = {Dan Kohen-Vacs and Maya Usher and Marc Jansen},
editor = {Chee-Kit Looi and Carlos Santos and Maria Angela Pellegrino and Mónica Aresta and Pierpaolo Vittorini and Rosella Gennari and Tania Di Mascio and Marco Temperini and Fernando Prieta and Antoine Nongaillard},
isbn = {978-3-032-05070-0},
year = {2025},
date = {2025-01-01},
booktitle = {Methodologies and Intelligent Systems for Technology Enhanced Learning, 15th International Conference},
pages = {196–207},
publisher = {Springer Nature Switzerland},
address = {Cham},
abstract = {This paper addresses the emerging gap between students' positive perceptions of Generative Artificial Intelligence (GAI) tools in programming education and their demonstrated ability to work effectively with AI-generated code. Drawing on empirical data from student perceptions and performance, we propose a framework for AI literacy in programming education. The framework identifies five core competencies: critical evaluation, error detection and correction, appropriate reliance, prompt engineering, and awareness of AI ethics. We present an assessment framework aligned with these competencies and discuss implications for programming curriculum design. This study contributes to addressing the critical need for targeted educational approaches that prepare students to leverage AI tools effectively while maintaining essential programming skills.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
@inbook{PehlkeAutomatedTesting25,
title = {Towards Automated Software Testing: Evaluating LLMs in Generating Effective Test Cases},
author = {Marcel Pehlke and Cindy Eudenbach and Maximilian Graw and Marc Jansen},
doi = {10.1007/978-3-031-95127-5_16},
isbn = {978-3-031-95126-8},
year = {2025},
date = {2025-01-01},
pages = {205-217},
keywords = {},
pubstate = {published},
tppubtype = {inbook}
}
@inbook{PehlkeInsurance25,
title = {About Decentralized Insurance. A Blockchain Based Approach with Integrated AI},
author = {Marcel Pehlke and Marc Jansen},
doi = {10.1007/978-3-031-81928-5_25},
isbn = {978-3-031-81927-8},
year = {2025},
date = {2025-01-01},
pages = {258-267},
keywords = {},
pubstate = {published},
tppubtype = {inbook}
}
@inbook{SchmidtLCNC25,
title = {Development and Evaluation of a Framework for the Design and Management of Blockchain-Based Process Chains in a Circular Economy},
author = {Lambert Schmidt and Marc Jansen},
doi = {10.1007/978-3-031-81928-5_16},
isbn = {978-3-031-81927-8},
year = {2025},
date = {2025-01-01},
pages = {160-169},
keywords = {},
pubstate = {published},
tppubtype = {inbook}
}
@inproceedings{10896148,
title = { Merging Realities: Exploring Mixed Reality as a Research Tool for Human-Robot Interaction in Real-World Settings },
author = {Jan Schulten and Andre Helgert and Alexander Arntz and Carolin StraBmann and Sabrina C. Eimler},
url = {https://doi.ieeecomputersociety.org/10.1109/AIxVR63409.2025.00029},
doi = {10.1109/AIxVR63409.2025.00029},
year = {2025},
date = {2025-01-01},
booktitle = {2025 IEEE International Conference on Artificial Intelligence and eXtended and Virtual Reality (AIxVR)},
pages = {147-153},
publisher = {IEEE Computer Society},
address = {Los Alamitos, CA, USA},
abstract = {The application of Virtual Reality (VR) in Human-Robot Interaction (HRI) research is growing due to its capacity to create adaptable yet controlled study environments. While VR often achieves data validity comparable to real-world studies, it faces limitations when physical interaction with robots is required. Mixed Reality (MR) offers a potential solution by enabling interactions with virtual robots in real-world settings, allowing participants to engage with realistic, interactive simulations that adapt to physical environments. Given the limited use of MR in HRI studies and the need for further understanding of its effectiveness in generating transferable results, this study examines MR's potential as a tool for simulating social-robot interaction. We conducted a study involving 21 participants interacting with a virtual robot performing navigation tasks in a real library and assessed self-efficacy, presence, technology acceptance, perceived realism, and social characteristics of the robot. The results show that most participants perceived the interaction with the robot as successful, the engagement was high and the robot interaction with MR provided excellent usability. These results suggest that MR has potential as a research and training tool for simulating human-robot interaction in navigation tasks within public spaces.},
keywords = {Training;Solid modeling;Navigation;Merging;Human-robot interaction;Mixed reality;Virtual reality;Libraries;Usability;Robots},
pubstate = {published},
tppubtype = {inproceedings}
}
@inproceedings{10896073,
title = { Beyond Coding: Empowering HRI Researchers with an Authoring Tool for Simplified VR Studies },
author = {Andre Helgert and Sabrina C. Eimler and Tom Gross},
url = {https://doi.ieeecomputersociety.org/10.1109/AIxVR63409.2025.00056},
doi = {10.1109/AIxVR63409.2025.00056},
year = {2025},
date = {2025-01-01},
booktitle = {2025 IEEE International Conference on Artificial Intelligence and eXtended and Virtual Reality (AIxVR)},
pages = {290-295},
publisher = {IEEE Computer Society},
address = {Los Alamitos, CA, USA},
abstract = {Although Virtual Reality (VR) is a promising tool in today's Human-Robot Interaction (HRI) research, the technical hurdle of creating high-quality and customized VR applications for one's own research prevents its comprehensive use. To address this problem, we present a VR authoring tool for HRI research, allowing non-technical researchers to create individual study designs in a simplified manner with predefined environments, robots, and measurement methods. Furthermore, the authoring tool has a highly modularized structure so that it can be adapted to a wide range of use cases. Technical details are presented, covering UI/UX decisions in the study design process and the visual programming interface for the creation of the interaction scheme of the robot, as well as the data management system that transfers researchers' study setups into a suitable VR application. The VR authoring tool is intended to bridge the gap between the practical applicability of VR as a research tool and the required technical implementation expertise for VR applications.},
keywords = {Visualization;Authoring systems;Human-robot interaction;Virtual reality;Programming;Encoding;Artificial intelligence;Robots},
pubstate = {published},
tppubtype = {inproceedings}
}
@inproceedings{10.1145/3706599.3720278,
title = {Prompt it Colorful with Rainbow Bot: Enhancing Video-Based Collaborative Learning by using a Multi-Party AI-Driven Chatbot},
author = {Andre Helgert and Latoya Weis and Carolin Strassmann},
url = {https://doi.org/10.1145/3706599.3720278},
doi = {10.1145/3706599.3720278},
isbn = {9798400713958},
year = {2025},
date = {2025-01-01},
booktitle = {Proceedings of the Extended Abstracts of the CHI Conference on Human Factors in Computing Systems},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
series = {CHI EA '25},
abstract = {Multi-party AI-driven chatbots remain largely unexplored, despite their potential to enhance internal communication and coordination within student learning groups. These benefits are increasingly feasible with the advent of large language models (LLMs), which enable more efficient content generation and chatbot customization. To bridge this gap, we carried out an exploratory study to examine students’ perceptions, practical applications, and concerns regarding the use of multi-party AI-driven chatbots in video-based collaborative learning environments. Based on the findings, we designed the Rainbow Bot, an optimized multi-party AI-driven chatbot. It features an interactive reflection process to strengthen group dynamics, customization options to adjust response length and content focus, and a unique color scheme for visual clarity. By combining colors from group members in refined prompts, Rainbow Bot fosters collaboration and promotes shared understanding within teams. Future work will assess its effectiveness in real educational settings, with a focus on its impact on group dynamics and collaborative learning outcomes.},
keywords = {AI-driven chatbots, Artifical Intelligence, Chatbot, Collaborative Learning, Higher Education, Multi-party AI-driven chatbots},
pubstate = {published},
tppubtype = {inproceedings}
}
2024
@article{SciRep-BakHan2024,
title = {One size does not fit all: Benchmarking modelselection scores for image classification},
author = {Nermeen Abou Baker and Uwe Handmann},
url = {https://www.nature.com/articles/s41598-024-81752-w},
doi = {10.1038/s41598-024-81752-w},
issn = {2045-2322},
year = {2024},
date = {2024-12-01},
urldate = {2024-12-01},
journal = {Scientific Reports (Sci Rep)},
volume = {14},
number = {30239},
publisher = {Nature},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
@article{MAKE-BakRohHan2024,
title = {Parameter-efficient fine-tuning of large pretrained models for instance segmentation tasks},
author = {Nermeen Abou Baker and David Rohrschneider and Uwe Handmann},
url = {https://www.mdpi.com/2504-4990/6/4/133},
doi = {10.3390/make6040133},
issn = {2504-4990},
year = {2024},
date = {2024-12-01},
urldate = {2024-12-01},
journal = {Machine Learning and Knowledge Extraction},
volume = {6},
number = {4},
pages = {2783–2807},
keywords = {},
pubstate = {published},
tppubtype = {article}
}
@inproceedings{icnr2024,
title = {Deep-learning-based identification of individual motion characteristics from upper-limb trajectories towards disorder stage evaluation},
author = {Tim Sziburis and Susanne Blex and Tobias Glasmachers and Ioannis Iossifidis},
editor = {Jose L. Pons and Jesus Tornero and Metin Akay},
year = {2024},
date = {2024-11-30},
urldate = {2024-11-30},
booktitle = {Converging Clinical and Engineering Research on Neurorehabilitation V - Proceedings of the 6th International Conference on Neurorehabilitation (ICNR2024)},
publisher = {Springer International Publishing},
address = {La Granja, Spain},
series = {Biosystems and Biorobotics},
keywords = {BCI, human arm motion, Motor control},
pubstate = {published},
tppubtype = {inproceedings}
}
@inproceedings{nokey,
title = {Generative AI in Higher Education - Perspectives from Students and Teaching Staff},
author = {Lukas Erle and Thomas Hoss and Isabel Peltzer and Sabrina C. Eimler},
url = {https://www.helmeto2024.it/storage/2024/11/BOA_HELMETO2024.pdf},
isbn = {978-88-99978-67-9},
year = {2024},
date = {2024-11-12},
urldate = {2024-11-12},
booktitle = {HELMeTO 2024 - Book of Abstracts},
pages = {173-175},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
@inproceedings{nokey,
title = {Integrating Collaborative Video-Based Learning for Transdisciplinary Case Work in Pedagogical and Health-Related Education},
author = {André Helgert and Nadine Elstrodt-Wefing and Michelle Möhring and Carolin Straßmann },
url = {https://www.helmeto2024.it/storage/2024/11/BOA_HELMETO2024.pdf},
isbn = {978-88-99978-67-9},
year = {2024},
date = {2024-11-12},
urldate = {2024-11-12},
booktitle = {HELMeTO 2024 - Book of Abstracts},
pages = {17-19},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
@conference{nokey,
title = {All too White? Effects of Anthropomorphism on the Stereotypical Perception of Robot Color},
author = {Julia Barenbrock and Sabrina C. Eimler and André Helgert and Carolin Straßmann},
editor = {IEEE},
doi = {10.1109/RO-MAN60168.2024.10731329},
year = {2024},
date = {2024-10-30},
urldate = {2024-10-30},
booktitle = {2024 33rd IEEE International Conference on Robot and Human Interactive Communication (ROMAN)},
pages = {89-96},
abstract = {With multi-user scenarios in human-robot interaction the problem of predisposed and unfair robot treatments due to biases arises. Thus, this study explores whether individuals recognize discrimination by a social robot and the impact of the feeling of exclusion. As a social consequence, the influence of robot discrimination on the perception of interaction partners and the attribution of blame is focused. Employing a VR-based multi-user lab experiment simulating a library task, participants experienced discrimination by a robot. Results suggest that discriminated individuals felt more discriminated against, albeit not significantly more ostracized. Moreover, discrimination influenced the self-attribution of blame and observers' evaluations of the discriminated user's competence. This work highlights the complex social impact of robot discrimination on human},
keywords = {},
pubstate = {published},
tppubtype = {conference}
}
@conference{nokey,
title = {Towards Understandable Transparency in Human-Robot-Interactions in Public Spaces},
author = {André Helgert and Lukas Erle and Sabrina Langer and Carolin Straßmann and Sabrina C. Eimler},
editor = {IEEE},
doi = {10.1109/RO-MAN60168.2024.10731175},
year = {2024},
date = {2024-10-30},
urldate = {2024-10-30},
booktitle = {2024 33rd IEEE International Conference on Robot and Human Interactive Communication (ROMAN)},
pages = {1162 - 1169},
keywords = {},
pubstate = {published},
tppubtype = {conference}
}
@article{lehmlerUnderstandingActivationPatterns2024,
title = {Understanding Activation Patterns in Artificial Neural Networks by Exploring Stochastic Processes: Discriminating Generalization from Memorization},
author = {Stephan Johann Lehmler and Muhammad Saif-ur-Rehman and Tobias Glasmachers and Ioannis Iossifidis},
editor = {Elsevier},
url = {https://www.sciencedirect.com/science/article/pii/S092523122401244X},
doi = {10.1016/j.neucom.2024.128473},
issn = {0925-2312},
year = {2024},
date = {2024-09-19},
urldate = {2024-09-19},
journal = {Neurocomputing},
pages = {128473},
abstract = {To gain a deeper understanding of the behavior and learning dynamics of artificial neural networks, mathematical abstractions and models are valuable. They provide a simplified perspective and facilitate systematic investigations. In this paper, we propose to analyze dynamics of artificial neural activation using stochastic processes, which have not been utilized for this purpose thus far. Our approach involves modeling the activation patterns of nodes in artificial neural networks as stochastic processes. By focusing on the activation frequency, we can leverage techniques used in neuroscience to study neural spike trains. Specifically, we extract the activity of individual artificial neurons during a classification task and model their activation frequency. The underlying process model is an arrival process following a Poisson distribution.We examine the theoretical fit of the observed data generated by various artificial neural networks in image recognition tasks to the proposed model’s key assumptions. Through the stochastic process model, we derive measures describing activation patterns of each network. We analyze randomly initialized, generalizing, and memorizing networks, allowing us to identify consistent differences in learning methods across multiple architectures and training sets. We calculate features describing the distribution of Activation Rate and Fano Factor, which prove to be stable indicators of memorization during learning. These calculated features offer valuable insights into network behavior. The proposed model demonstrates promising results in describing activation patterns and could serve as a general framework for future investigations. It has potential applications in theoretical simulation studies as well as practical areas such as pruning or transfer learning.},
keywords = {Artificial neural networks, Generalization, Machine Learning, Memorization, Poisson process, Stochastic modeling},
pubstate = {published},
tppubtype = {article}
}
@inproceedings{AdaptiveBraincomputerInterfaces2024,
title = {Adaptive Brain-Computer Interfaces Based on Error-Related Potentials and Reinforcement Learning},
author = {Aline Xavier Fidencio and Christian Klaes and Ioannis Iossifidis},
url = {https://abstracts.g-node.org/conference/BC24/abstracts#/uuid/03d3dd16-4c50-43d8-b878-abcfa7857386},
year = {2024},
date = {2024-09-18},
urldate = {2024-09-24},
booktitle = {BC24 : Computational Neuroscience & Neurotechnology Bernstein Conference 2024},
publisher = {BCCN Bernstein Network Computational Networkvphantom},
abstract = {Error-related potentials (ErrPs) represent the neural signature of error processing in the brain and numerous studies have demonstrated their reliable detection using non-invasive techniques such as electroencephalography (EEG). Over recent decades, the brain-computer interface (BCI) community has shown growing interest in leveraging these intrinsic feedback signals to enhance system performance. However, the effective use of ErrPs in a closed-loop setup crucially depends on accurate single-trial detection, which is typically achieved using a subject-specific classifier (or decoder) trained on samples recorded during extensive calibration sessions before the BCI system can be deployed. In our research, we explore the potential of simulated EEG data for training a truly generic ErrP classifier. Utilizing the SEREEGA simulator, we demonstrate that EEG data can be generated in a cost-effective manner, allowing for controlled and systematic variations in data distribution to accommodate uncertainties in ErrP generation. A classifier trained solely on the generated data exhibits promising generalization capabilities across different datasets and performs comparably to a leave-one-subject-out approach trained on real data (Xavier Fidêncio et al., 2024). In our experiments, we deliberately provoked ErrPs when the BCI misinterpreted the user's intention, resulting in incorrect actions. Subjects engaged in a game controlled via keyboard and/or motor imagery (imagining hand movements), with EEG data recorded using various EEG systems for comparison. Considering the challenges in obtaining clear ErrP signals for all subjects and the limitations identified in existing literature (Xavier Fidêncio et al., 2022), we hypothesize whether a measurable error signal is consistently generated at the scalp level when subjects encounter erroneous conditions, and how this influences closed-loop setups that incorporate ErrPs for improved BCI performance. To address these questions, we assess the effects of the occurrence-to-detection ratio of ErrPs in the classification pipeline using simulated data and explore the impact of error misclassification rates in an ErrP-based learning framework, which employs reinforcement learning to enhance BCI performance.},
keywords = {BCI, Machine Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
@inproceedings{ControversialOpinionsModel2024,
title = {Controversial Opinions on Model Based and Model Free Reinforcement Learning in the Brain},
author = {Felix Grün and Ioannis Iossifidis},
url = {https://abstracts.g-node.org/conference/BC24/abstracts#/uuid/18e92e07-e4b1-43af-b2ac-ea282f4e81e7},
year = {2024},
date = {2024-09-18},
urldate = {2024-09-24},
publisher = {BCCN Bernstein Network Computational Networkvphantom},
abstract = {Dopaminergic Reward Prediction Errors (RPEs) are a key motivation and inspiration for model free, temporal difference reinforcement learning methods. Originally, the correlation of RPEs with model free temporal difference errors was seen as a strong indicator for model free reinforcement learning in brains. The standard view was that model free learning is the norm and more computationally expensive model based decision-making is only used when it leads to outcomes that are good enough to justify the additional effort. Nowadays, the landscape of opinions, models and experimental evidence, both electrophysiological and behavioral, paints a more complex picture, including but not limited to mechanisms of arbitration between the two systems. Model based learning or hybrid models better capture experimental behavioral data, and model based signatures are found in RPEs that were previously thought to be model free or hybrid [1]. The evidence for clearly model free learning is scarce [2]. On the other hand, multiple approaches show how model based behavior and RPEs can be produced with fundamentally model free reinforcement learning methods [3, 4, 5]. We point out findings that seem to contradict each other, others that complement each other, speculate which ideas are compatible with each other and give our opinions on ways forward, towards understanding if and how model based and model free learning from rewards coexist and interact in the brain.},
keywords = {Machine Learning, Reinforcement learning},
pubstate = {published},
tppubtype = {inproceedings}
}
@inproceedings{DecodingUpperLimb2024,
title = {Decoding Upper Limb Movements},
author = {Marie Dominique Schmidt and Ioannis Iossifidis},
url = {https://abstracts.g-node.org/conference/BC24/abstracts#/uuid/4725140f-ce7c-4ac5-b694-c627ceeb8d98},
year = {2024},
date = {2024-09-18},
urldate = {2024-09-24},
publisher = {BCCN Bernstein Network Computational Networkvphantom},
abstract = {The upper limbs are essential for performing everyday tasks that require a wide range of motion and precise coordination. Planning and timing are crucial to achieve coordinated movement. Sensory information about the target and current body state is critical, as is the integration of prior experience represented by prelearned inverse dynamics that generate the associated muscle activity. We propose a generative model that uses a recurrent neural network to predict upper limb muscle activity during various simple and complex everyday movements. By identifying movement primitives within the signal, our model enables the decomposition of these movements into a fundamental set, facilitating the reconstruction of muscle activity patterns. Our approach has implications for the fundamental understanding of movement control and the rehabilitation of neuromuscular disorders with myoelectric prosthetics and functional electrical stimulation.},
keywords = {BCI, Machine Learning, Muscle activity},
pubstate = {published},
tppubtype = {inproceedings}
}
@inproceedings{StochasticProcessModel2024,
title = {Stochastic Process Model Derived Indicators of Overfitting for Deep Architectures: Applicability to Small Sample Recalibration of sEMG Decoders},
author = {Stephan Johann Lehmler and Ioannis Iossifidis},
url = {https://abstracts.g-node.org/conference/BC24/abstracts#/uuid/72f03ff1-61dc-443c-92c2-b623d672ce15},
year = {2024},
date = {2024-09-18},
urldate = {2024-09-24},
booktitle = {BC24 : Computational Neuroscience & Neurotechnology Bernstein Conference 2024},
publisher = {BCCN Bernstein Network Computational Networkvphantom},
abstract = {Our recent work presents a stochastic process model of the activations within an ANN and shows a promising indicator to distinguish memorizing from generalizing ANNs. The average λ, or mean firing rate (MFR), of a hidden layer, shows stable differences between memorizing and generalizing networks, comparatively independent of the underlying data used for evaluation. We first show the performance of this indicator during training on benchmark computer vision datasets such as MNIST and CIFAR-10. In a second step, we extend the work to the real-life use case of calibrating a pre-trained model to a new user. We focus on decoding surface electromyographic (sEMG) signals, which are highly variable within and between users, and therefore necessitate frequent user calibration. Especially in situations when user calibration has to only rely on a small number of samples, degradation in performance overtime due to memorization and overfitting is a not unlikely outcome. In those cases, traditional regularization methods that function by observing the performance on a validation set, such as early stopping, don’t necessarily work, because they are evaluated on data from the same subject and set of movements, which features are being memorized. Our new indicators of memorization could help as stable indicators for model performance and give live insights during model calibration when more samples from the new users would be necessary. We evaluate the usefulness of the MFR-indicator for identifying the moment a pre-trained sEMG decoder starts to memorize given inputs},
keywords = {Machine Learning},
pubstate = {published},
tppubtype = {inproceedings}
}
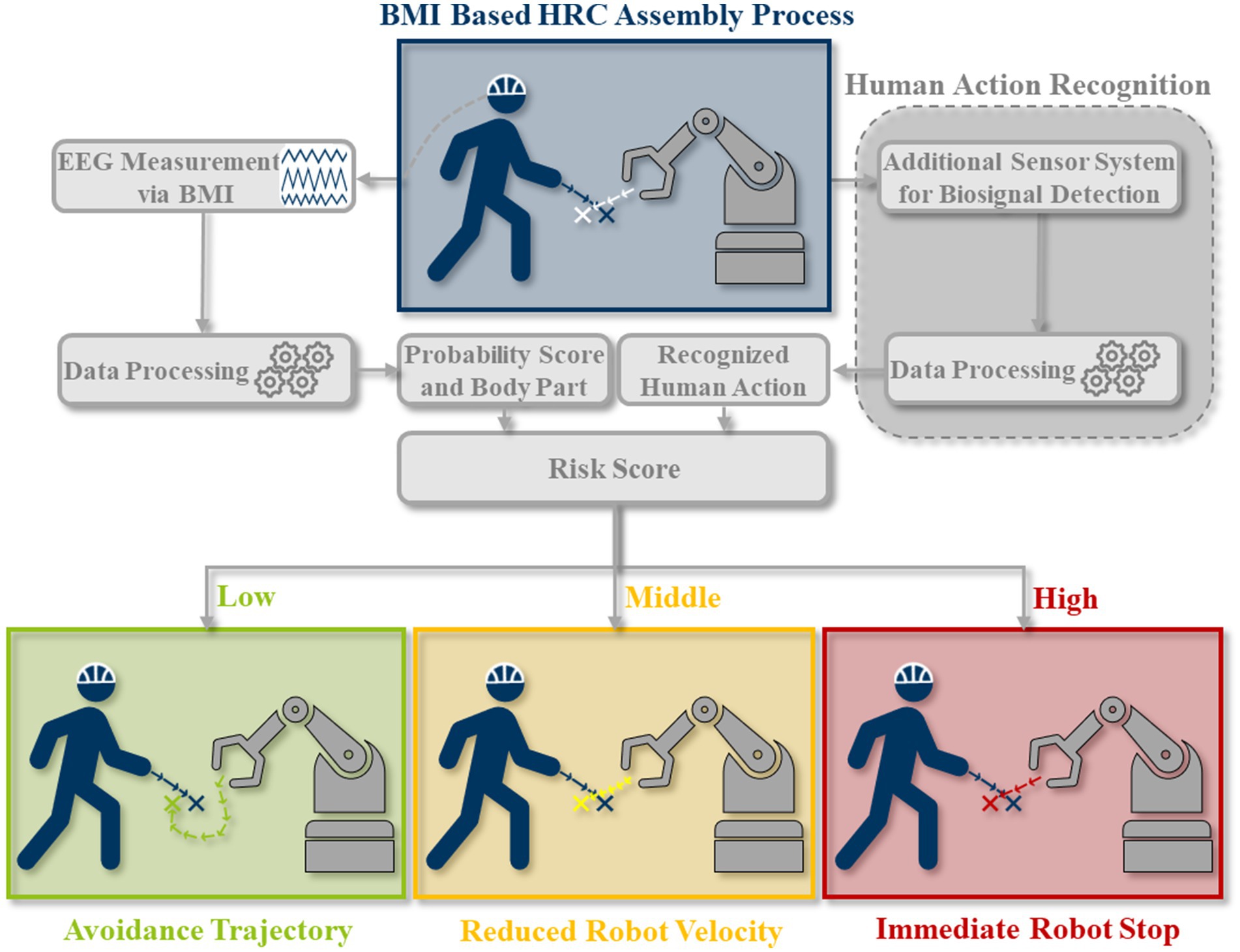
@article{pilacinskiHumanCollaborativeLoop2024,
title = {Human in the Collaborative Loop: A Strategy for Integrating Human Activity Recognition and Non-Invasive Brain-Machine Interfaces to Control Collaborative Robots},
author = {Artur Pilacinski and Lukas Christ and Marius Boshoff and Ioannis Iossifidis and Patrick Adler and Michael Miro and Bernd Kuhlenkötter and Christian Klaes},
url = {https://www.frontiersin.org/journals/neurorobotics/articles/10.3389/fnbot.2024.1383089/full},
doi = {10.3389/fnbot.2024.1383089},
issn = {1662-5218},
year = {2024},
date = {2024-09-18},
urldate = {2024-09-18},
journal = {Frontiers in Neurorobotics},
volume = {18},
publisher = {Frontiers},
keywords = {BCI, EEG, Human action recognition, human-robot collaboration, Sensor Fusion},
pubstate = {published},
tppubtype = {article}
}
@inproceedings{3DMovementAnalysis2024,
title = {3D Movement Analysis of the Ruhr Hand Motion Catalog of Human Center-Out Transport Trajectories},
author = {Stephan Johann Lehmler and Ioannis Iossifidis},
url = {https://abstracts.g-node.org/conference/BC24/abstracts#/uuid/719bca6f-9fb9-4e53-96a5-a7b36b67c012},
year = {2024},
date = {2024-09-18},
urldate = {2024-09-18},
booktitle = {BC24 : Computational Neuroscience & Neurotechnology Bernstein Conference 2024},
publisher = {BCCN Bernstein Network Computational Networkvphantom},
abstract = {The Ruhr Hand Motion Catalog of Human Center-Out Transport Trajectories [1] is a compilation of three-dimensional task-space motion data simultaneously measured by two motion tracking systems. The first one, an optical motion capture system, provided robust reference data. The second recording system consisted of a single state-of-the-art IMU to demonstrate the feasibility of portable applications. The transport object was moved in 3D space from a unified start position to one of nine target positions, equidistantly aligned on a semicircle. Ten trials were performed per target and hand, resulting in 180 trials per participant in total. 31 participants (11 female, 20 male, age 21-78) without known movement disorders took part in the experiment. Based on those experimental data, we analyze several characteristics of upper-limb trajectories. All data are rotated so that the straight connection of the defined start and target positions composes the y-axis. By doing so, we explore properties which are independent of the directly measured target location for each task and focus on common properties shared between all target movements. Particularly, we investigate how individual or target-dependent differences can still be quantified after rotation. Furthermore, we model the measured movements by means of dynamical systems (extended attractor dynamics). Differences between the transportation movements to different targets would result in varying parameter sets. The investigated motion characteristics include the symmetry of velocity peaks and the polynomial target dependence of planarity attributes. To compare the diversity of trajectories in time and space, we introduce a novel variability measure for the planarity of hand paths regarding plane angles and path amplitudes within the plane. These aspects can expose differences between trials (intra-subject) and participants (inter-subject), explored in the modelling process and applied as a methodological framework for pathological analysis. For this, further measurements with patients experiencing movement disorders are planned for future examination. The separability can also be evaluated by machine learning of task classification and user identification. This can provide information on the potential of data-driven pathological analysis to extend the model-based approach since the described experiment and study are conducted in the context of developing a portable glove for the diagnosis of movement disorders.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
@inproceedings{nokey,
title = {Conceptualizing and Designing a Virtual Reality Authoring Tool for Human-Robot Interaction Studies - Learnings and Guidance from Expert Interviews },
author = {André Helgert and Carolin Straßmann and Sabrina C. Eimler},
editor = {ACM},
doi = {https://doi.org/10.1145/3670653.3670664},
year = {2024},
date = {2024-09-01},
urldate = {2024-09-01},
booktitle = {MuC '24: Proceedings of Mensch und Computer 2024},
pages = {331-341},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
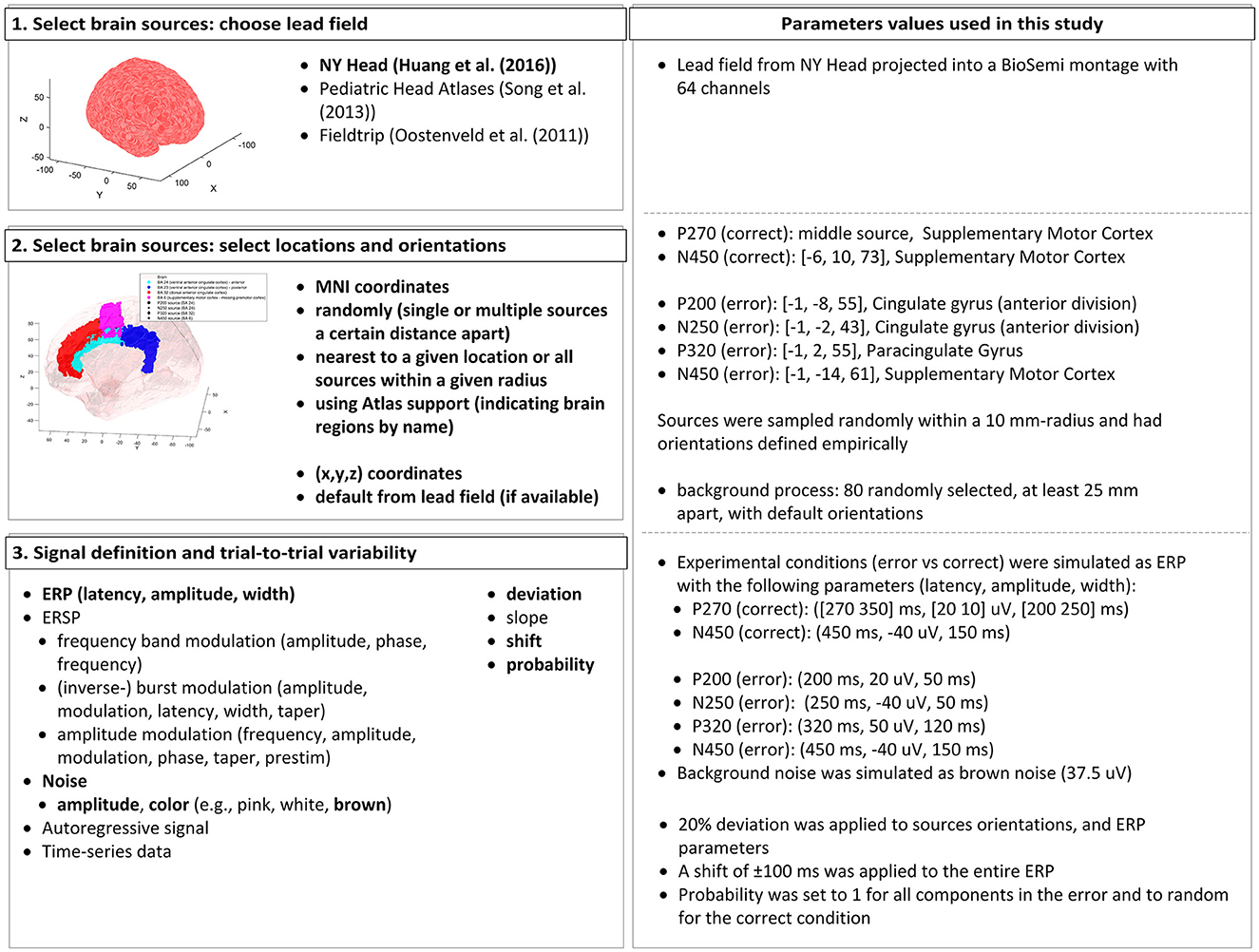
@article{xavierfidencioGenericErrorrelatedPotential2024,
title = {A Generic Error-Related Potential Classifier Based on Simulated Subjects},
author = {Aline Xavier Fidêncio and Christian Klaes and Ioannis Iossifidis},
editor = {Frontiers Media SA},
url = {https://www.frontiersin.org/journals/human-neuroscience/articles/10.3389/fnhum.2024.1390714/full},
doi = {10.3389/fnhum.2024.1390714},
issn = {1662-5161},
year = {2024},
date = {2024-07-19},
urldate = {2024-07-19},
journal = {Frontiers in Human Neuroscience},
volume = {18},
pages = {1390714},
publisher = {Frontiers},
abstract = {$<$p$>$Error-related potentials (ErrPs) are brain signals known to be generated as a reaction to erroneous events. Several works have shown that not only self-made errors but also mistakes generated by external agents can elicit such event-related potentials. The possibility of reliably measuring ErrPs through non-invasive techniques has increased the interest in the brain-computer interface (BCI) community in using such signals to improve performance, for example, by performing error correction. Extensive calibration sessions are typically necessary to gather sufficient trials for training subject-specific ErrP classifiers. This procedure is not only time-consuming but also boresome for participants. In this paper, we explore the effectiveness of ErrPs in closed-loop systems, emphasizing their dependency on precise single-trial classification. To guarantee the presence of an ErrPs signal in the data we employ and to ensure that the parameters defining ErrPs are systematically varied, we utilize the open-source toolbox SEREEGA for data simulation. We generated training instances and evaluated the performance of the generic classifier on both simulated and real-world datasets, proposing a promising alternative to conventional calibration techniques. Results show that a generic support vector machine classifier reaches balanced accuracies of 72.9%, 62.7%, 71.0%, and 70.8% on each validation dataset. While performing similarly to a leave-one-subject-out approach for error class detection, the proposed classifier shows promising generalization across different datasets and subjects without further adaptation. Moreover, by utilizing SEREEGA, we can systematically adjust parameters to accommodate the variability in the ErrP, facilitating the systematic validation of closed-loop setups. Furthermore, our objective is to develop a universal ErrP classifier that captures the signal's variability, enabling it to determine the presence or absence of an ErrP in real EEG data.$<$/p$>$},
keywords = {adaptive brain-machine (computer) interface, BCI, EEG, Error-related potential (ErrP), ErrP classifier, Generic decoder, Machine Learning, SEREEGA, Simulation},
pubstate = {published},
tppubtype = {article}
}
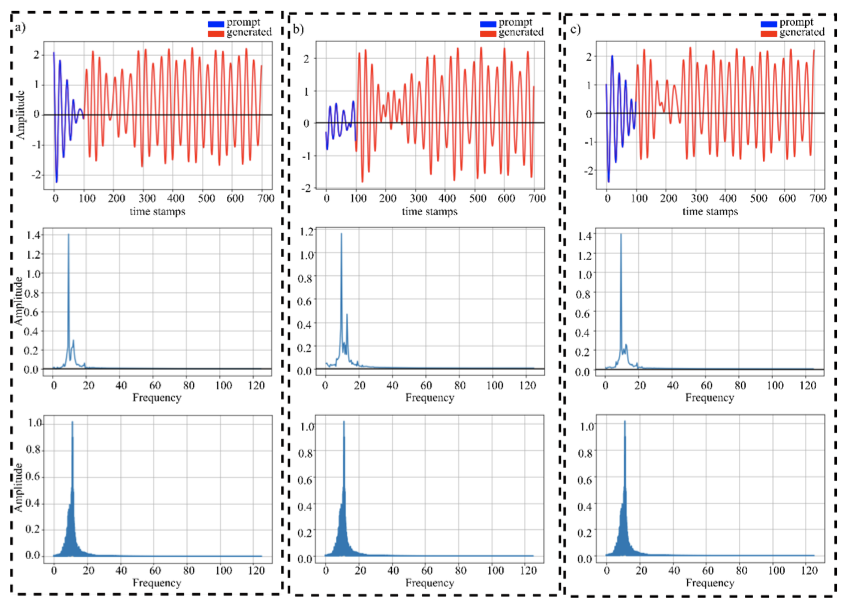
@article{aliGETGenerativeEEG2024,
title = {GET: A Generative EEG Transformer for Continuous Context-Based Neural Signals},
author = {Omair Ali and Muhammad Saif-ur-Rehman and Marita Metzler and Tobias Glasmachers and Ioannis Iossifidis and Christian Klaes},
url = {http://arxiv.org/abs/2406.03115},
doi = {10.48550/arXiv.2406.03115},
year = {2024},
date = {2024-06-09},
urldate = {2024-06-09},
journal = {arXiv:2406.03115 [q-bio]},
abstract = {Generating continuous electroencephalography (EEG) signals through advanced artificial neural networks presents a novel opportunity to enhance brain-computer interface (BCI) technology. This capability has the potential to significantly enhance applications ranging from simulating dynamic brain activity and data augmentation to improving real-time epilepsy detection and BCI inference. By harnessing generative transformer neural networks, specifically designed for EEG signal generation, we can revolutionize the interpretation and interaction with neural data. Generative AI has demonstrated significant success across various domains, from natural language processing (NLP) and computer vision to content creation in visual arts and music. It distinguishes itself by using large-scale datasets to construct context windows during pre-training, a technique that has proven particularly effective in NLP, where models are fine-tuned for specific downstream tasks after extensive foundational training. However, the application of generative AI in the field of BCIs, particularly through the development of continuous, context-rich neural signal generators, has been limited. To address this, we introduce the Generative EEG Transformer (GET), a model leveraging transformer architecture tailored for EEG data. The GET model is pre-trained on diverse EEG datasets, including motor imagery and alpha wave datasets, enabling it to produce high-fidelity neural signals that maintain contextual integrity. Our empirical findings indicate that GET not only faithfully reproduces the frequency spectrum of the training data and input prompts but also robustly generates continuous neural signals. By adopting the successful training strategies of the NLP domain for BCIs, the GET sets a new standard for the development and application of neural signal generation technologies.},
keywords = {BCI, EEG, Machine Learning, Quantitative Biology - Neurons and Cognition},
pubstate = {published},
tppubtype = {article}
}
@conference{Straßmann2024,
title = {"Don't Judge a Book by its Cover": Exploring Discriminatory Behavior in Multi-User-Robot Interaction},
author = {Carolin Straßmann and Cindy Eudenbach and Alexander Arntz and Sabrina C. Eimler},
editor = {ACM/IEEE},
doi = {https://doi.org/10.1145/3610978.3640545},
year = {2024},
date = {2024-03-11},
urldate = {2024-03-11},
booktitle = {HRI '24: Companion of the 2024 ACM/IEEE International Conference on Human-Robot Interaction
},
pages = {1023-1027},
abstract = {With multi-user scenarios in human-robot interaction the problem of predisposed and unfair robot treatments due to biases arises. Thus, this study explores whether individuals recognize discrimination by a social robot and the impact of the feeling of exclusion. As a social consequence, the influence of robot discrimination on the perception of interaction partners and the attribution of blame is focused. Employing a VR-based multi-user lab experiment simulating a library task, participants experienced discrimination by a robot. Results suggest that discriminated individuals felt more discriminated against, albeit not significantly more ostracized. Moreover, discrimination influenced the self-attribution of blame and observers' evaluations of the discriminated user's competence. This work highlights the complex social impact of robot discrimination on human interactions and team dynamics.},
keywords = {},
pubstate = {published},
tppubtype = {conference}
}
@inproceedings{10445597,
title = {Teamwork Makes the Dream Work: A Virtual Reality-based Human-Robot Collaboration Sandbox Simulating Multiple Teams},
author = {Alexander Arntz and Agostino Di Dia and Tim Riebner and Carolin Straßmann and Sabrina C. Eimler},
doi = {10.1109/AIxVR59861.2024.00057},
issn = {2771-7453},
year = {2024},
date = {2024-01-01},
urldate = {2024-01-01},
booktitle = {2024 IEEE International Conference on Artificial Intelligence and eXtended and Virtual Reality (AIxVR)},
pages = {335-339},
abstract = {We present a virtual reality-based Human-Robot Collaboration sandbox that allows the representation of multiple teams composed of humans and robots. Within the sandbox, virtual robots and humans can collaborate with their respective partners and interact with other teams to coordinate the required procedures while accomplishing a shared task. For this purpose, the virtual reality sandbox is equipped with a variety of interaction mechanics that enable a range of different shared tasks. The network integration allows for multiple users within the virtual environment. The VR application contains a library of different industrial robots that can act autonomously controlled by machine learning agents and interact with the user through verbal commands. The sandbox is specifically designed to serve as a research tool to explore new concepts and validate existing approaches in the domain of Human-Robot Collaboration involving autonomous robots in a series of upcoming studies.},
keywords = {Robot kinematics;Virtual assistants;Virtual environments;Industrial robots;Libraries;Teamwork;Task analysis;Human-Robot Collaboration;Virtual Reality;Machine Learning;Artificial Intelligence},
pubstate = {published},
tppubtype = {inproceedings}
}
@inproceedings{JansenArbitrage24,
title = {SFinding Secure Arbitrage Trades in Different Exchange Architectures booktitle = Blockchain and Cryptocurrency, Vol. 2, Issue 1, February 2024},
author = {Marc Jansen and Lars Karbach},
issn = {2938-2602},
year = {2024},
date = {2024-01-01},
pages = {40-50},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
@book{CE-IrrHanBue2024,
title = {Transformation zur Circular Economy - Kleine und mittlere Unternehmen im Wandel begleiten},
author = {Sabine Büttner and Uwe Handmann and Wolfgang Irrek},
editor = {Sabine Büttner and Uwe Handmann and Wolfgang Irrek},
url = {https://link.springer.com/book/9783658433376},
year = {2024},
date = {2024-01-01},
urldate = {2024-01-01},
publisher = {Springer},
keywords = {},
pubstate = {published},
tppubtype = {book}
}
@inproceedings{10.1007/978-3-031-60412-6_4,
title = {Enabling Safe Empirical Studies for Human-Robot Collaboration: Implementation of a Sensor Array Driven Control Interface},
author = {Alexander Arntz},
editor = {Masaaki Kurosu and Ayako Hashizume},
isbn = {978-3-031-60412-6},
year = {2024},
date = {2024-01-01},
urldate = {2024-01-01},
booktitle = {Human-Computer Interaction},
pages = {42–57},
publisher = {Springer Nature Switzerland},
address = {Cham},
abstract = {In response to the growing relevance of collaborative robots, the need for empirical user studies in the domain of Human-Robot Collaboration become increasingly important. While collaborative robots incorporate internal safety features, their usage for user studies remains associated with inherent safety risks. This project addresses these challenges by introducing a toolbox for a robot arm to conduct Wizard-of-Oz studies by using advanced controls complemented by a sophisticated security system leveraging microcontrollers and human presence detection sensors. This approach unifies both control systems within a single application, seamlessly monitoring and synchronizing their respective inputs. The gamepad control scheme offers Wizard-of-Oz study supervisors an intuitive means of interacting with the robot, enabling precise and responsive control while maintaining safety. Meanwhile, the security system, built on microcontroller technology and human presence detection sensors, acts as a vigilant guardian, continuously assessing the robot's surroundings for potential risks. This integrated application not only empowers users with effective control over the xArm 7 but also provides real-time feedback on the security status, enhancing the overall safety and usability of collaborative robots in various industrial settings. By bridging the gap between human operators and robots, this project contributes to the evolution of safer and more user-friendly human-robot collaboration.},
keywords = {},
pubstate = {published},
tppubtype = {inproceedings}
}
@book{JansenLLMBook2024,
title = {Software Engineering Meets Large Language Models},
editor = {Marc Jansen and Lambert Schmidt},
isbn = {9783759759535},
year = {2024},
date = {2024-01-01},
pages = {140},
publisher = {BoD – Books on Demand},
address = {Norderstedt},
keywords = {},
pubstate = {published},
tppubtype = {book}
}
The Spatial and~Temporal Resolution of~Motor Intention in~Multi-target Prediction Proceedings Article In: Neumann, Philipp; Puma, Michael J.; Lees, Michael H.; Groen, Derek; Dongarra, Jack J.; Sloot, Peter M. A. (Hrsg.): Computational Science – ICCS 2026, S. 421–428, Springer Nature Switzerland, Cham, 2026, ISBN: 978-3-032-29924-6. Performance Boundaries for~Brain-Computer Interfaces Using Error-Related Potentials and~Reinforcement Learning Proceedings Article In: Nicosia, Giuseppe; Ojha, Varun; Giesselbach, Sven; Pardalos, M. Panos; Umeton, Renato; Emanuele, La Malfa; Gabriele, La Malfa (Hrsg.): Machine Learning, Optimization, and Data Science, S. 335–349, Springer Nature Switzerland, Cham, 2026, ISBN: 978-3-032-21480-5. Distributional Properties of~ReLU-Activations in~Artificial Neural Networks That~Learn by~Memorization Proceedings Article In: Nicosia, Giuseppe; Ojha, Varun; Giesselbach, Sven; Pardalos, M. Panos; Umeton, Renato; Emanuele, La Malfa; Gabriele, La Malfa (Hrsg.): Machine Learning, Optimization, and Data Science, S. 410–423, Springer Nature Switzerland, Cham, 2026, ISBN: 978-3-032-21477-5. Invariance to~Quantile Selection in~Distributional Continuous Control Proceedings Article In: Nicosia, Giuseppe; Ojha, Varun; Giesselbach, Sven; Pardalos, M. Panos; Umeton, Renato; Emanuele, La Malfa; Gabriele, La Malfa (Hrsg.): Machine Learning, Optimization, and Data Science, S. 175–190, Springer Nature Switzerland, Cham, 2026, ISBN: 978-3-032-21477-5. The Spatial and Temporal Resolution of Motor Intention in Multi-Target Prediction Artikel In: arXiv:2603.05418 [q-bio.NC], 2026. Insights into Motor Control: Predict Muscle Activity from Upper Limb Kinematics with LSTM Networks Artikel In: Nature Scientific Reports, 2026, ISSN: 2045-2322. Need Satisfaction in Human-Robot Interaction in Public Spaces – A Positive Computing Approach Artikel In: International Journal of Social Robotics, 2026. Error-Related Potentials and Reinforcement Learning for Neuroadaptive Systems Proceedings Article In: BC25 : Bernstein Conference 2025,, BCCN Bernstein Network Computational Neuroscience & Neurotechnology , 2025. Predicting Upper Limb Muscle Activity from Kinematics Using LSTM Networks Proceedings Article In: Bernstein Conference 2025, BCCN Bernstein Network Computational Neuroscience & Neurotechnology , 2025. A Framework to Model Your Model Based / Model Free Action Selection Hypothesis Proceedings Article In: BC25 : Bernstein Conference 2025, , BCCN Bernstein Network Computational Neuroscience & Neurotechnology , 2025. Activation-Based Indicators of Memorization in ReLU Artificial Neural Networks: A Computational Perspective Proceedings Article In: BC25 : Bernstein Conference 2025, BCCN Bernstein Network Computational Neuroscience & Neurotechnology , 2025. In: Neurocomputing, S. 131370, 2025, ISSN: 0925-2312. Hand Motion Catalog of Human Center-Out Transport Trajectories Measured Redundantly in 3D Task-Space Artikel In: Bd. 12, Nr. 1, S. 1293, 2025, ISSN: 2052-4463. Artificial Intelligence in Education. AIED 2025., Bd. 15882, Lecture Notes in Computer Science Springer, Cham, 2025, ISBN: 978-3-031-98465-5. Hybrid Brain-Computer Interface Using Error-Related Potential and Reinforcement Learning Artikel In: Frontiers in Human Neuroscience, Bd. 19, 2025, ISSN: 1662-5161. Robot or Employee? Exploring People’s Choice for or Against an Interaction with a Social Robot Proceedings Article In: Proceedings of the International Conference on Social Robotics, S. 446–459, Springer Nature, 2025, ISBN: 978-981-96-3522-1. A Technical User Study on an Authoring Tool for Simplifying VR Study Setups in HRI Research Proceedings Article In: Proceedings of the 2025 ACM/IEEE International Conference on Human-Robot Interaction, S. 550-558, IEEE Press, 2025. Error-Related Potential Driven Reinforcement Learning for Adaptive Brain-Computer Interfaces Artikel In: Arxiv, 2025. Rethinking Model Selection Beyond ImageNet Accuracy for Waste Classification Konferenz International Conference on Pattern Recognition Applications and Methods (ICPRAM 2025), Porto, Portugal, 2025. In: International Journal of Artificial Intelligence in Education, 2025. Bridging the AI Gap: Developing AI Literacy in Programming Education Proceedings Article In: Looi, Chee-Kit; Santos, Carlos; Pellegrino, Maria Angela; Aresta, Mónica; Vittorini, Pierpaolo; Gennari, Rosella; Mascio, Tania Di; Temperini, Marco; Prieta, Fernando; Nongaillard, Antoine (Hrsg.): Methodologies and Intelligent Systems for Technology Enhanced Learning, 15th International Conference, S. 196–207, Springer Nature Switzerland, Cham, 2025, ISBN: 978-3-032-05070-0. Towards Automated Software Testing: Evaluating LLMs in Generating Effective Test Cases Buchkapitel In: S. 205-217, 2025, ISBN: 978-3-031-95126-8. About Decentralized Insurance. A Blockchain Based Approach with Integrated AI Buchkapitel In: S. 258-267, 2025, ISBN: 978-3-031-81927-8. In: S. 160-169, 2025, ISBN: 978-3-031-81927-8. Merging Realities: Exploring Mixed Reality as a Research Tool for Human-Robot Interaction in Real-World Settings Proceedings Article In: 2025 IEEE International Conference on Artificial Intelligence and eXtended and Virtual Reality (AIxVR), S. 147-153, IEEE Computer Society, Los Alamitos, CA, USA, 2025. Beyond Coding: Empowering HRI Researchers with an Authoring Tool for Simplified VR Studies Proceedings Article In: 2025 IEEE International Conference on Artificial Intelligence and eXtended and Virtual Reality (AIxVR), S. 290-295, IEEE Computer Society, Los Alamitos, CA, USA, 2025. Prompt it Colorful with Rainbow Bot: Enhancing Video-Based Collaborative Learning by using a Multi-Party AI-Driven Chatbot Proceedings Article In: Proceedings of the Extended Abstracts of the CHI Conference on Human Factors in Computing Systems, Association for Computing Machinery, New York, NY, USA, 2025, ISBN: 9798400713958. One size does not fit all: Benchmarking modelselection scores for image classification Artikel In: Scientific Reports (Sci Rep), Bd. 14, Nr. 30239, 2024, ISSN: 2045-2322. Parameter-efficient fine-tuning of large pretrained models for instance segmentation tasks Artikel In: Machine Learning and Knowledge Extraction, Bd. 6, Nr. 4, S. 2783–2807, 2024, ISSN: 2504-4990. Deep-learning-based identification of individual motion characteristics from upper-limb trajectories towards disorder stage evaluation Proceedings Article In: Pons, Jose L.; Tornero, Jesus; Akay, Metin (Hrsg.): Converging Clinical and Engineering Research on Neurorehabilitation V - Proceedings of the 6th International Conference on Neurorehabilitation (ICNR2024), Springer International Publishing, La Granja, Spain, 2024. Generative AI in Higher Education - Perspectives from Students and Teaching Staff Proceedings Article In: HELMeTO 2024 - Book of Abstracts, S. 173-175, 2024, ISBN: 978-88-99978-67-9. Integrating Collaborative Video-Based Learning for Transdisciplinary Case Work in Pedagogical and Health-Related Education Proceedings Article In: HELMeTO 2024 - Book of Abstracts, S. 17-19, 2024, ISBN: 978-88-99978-67-9. All too White? Effects of Anthropomorphism on the Stereotypical Perception of Robot Color Konferenz 2024 33rd IEEE International Conference on Robot and Human Interactive Communication (ROMAN), 2024. Towards Understandable Transparency in Human-Robot-Interactions in Public Spaces Konferenz 2024 33rd IEEE International Conference on Robot and Human Interactive Communication (ROMAN), 2024. In: Neurocomputing, S. 128473, 2024, ISSN: 0925-2312. Adaptive Brain-Computer Interfaces Based on Error-Related Potentials and Reinforcement Learning Proceedings Article In: BC24 : Computational Neuroscience & Neurotechnology Bernstein Conference 2024, BCCN Bernstein Network Computational Networkvphantom, 2024. Controversial Opinions on Model Based and Model Free Reinforcement Learning in the Brain Proceedings Article In: BCCN Bernstein Network Computational Networkvphantom, 2024. Decoding Upper Limb Movements Proceedings Article In: BCCN Bernstein Network Computational Networkvphantom, 2024. Stochastic Process Model Derived Indicators of Overfitting for Deep Architectures: Applicability to Small Sample Recalibration of sEMG Decoders Proceedings Article In: BC24 : Computational Neuroscience & Neurotechnology Bernstein Conference 2024, BCCN Bernstein Network Computational Networkvphantom, 2024. In: Frontiers in Neurorobotics, Bd. 18, 2024, ISSN: 1662-5218. 3D Movement Analysis of the Ruhr Hand Motion Catalog of Human Center-Out Transport Trajectories Proceedings Article In: BC24 : Computational Neuroscience & Neurotechnology Bernstein Conference 2024, BCCN Bernstein Network Computational Networkvphantom, 2024. Conceptualizing and Designing a Virtual Reality Authoring Tool for Human-Robot Interaction Studies - Learnings and Guidance from Expert Interviews Proceedings Article In: ACM, (Hrsg.): MuC '24: Proceedings of Mensch und Computer 2024, S. 331-341, 2024. A Generic Error-Related Potential Classifier Based on Simulated Subjects Artikel In: Frontiers in Human Neuroscience, Bd. 18, S. 1390714, 2024, ISSN: 1662-5161. GET: A Generative EEG Transformer for Continuous Context-Based Neural Signals Artikel In: arXiv:2406.03115 [q-bio], 2024. "Don't Judge a Book by its Cover": Exploring Discriminatory Behavior in Multi-User-Robot Interaction Konferenz HRI '24: Companion of the 2024 ACM/IEEE International Conference on Human-Robot Interaction
, 2024. Teamwork Makes the Dream Work: A Virtual Reality-based Human-Robot Collaboration Sandbox Simulating Multiple Teams Proceedings Article In: 2024 IEEE International Conference on Artificial Intelligence and eXtended and Virtual Reality (AIxVR), S. 335-339, 2024, ISSN: 2771-7453. SFinding Secure Arbitrage Trades in Different Exchange Architectures booktitle = Blockchain and Cryptocurrency, Vol. 2, Issue 1, February 2024 Proceedings Article In: S. 40-50, 2024, ISSN: 2938-2602. Enabling Safe Empirical Studies for Human-Robot Collaboration: Implementation of a Sensor Array Driven Control Interface Proceedings Article In: Kurosu, Masaaki; Hashizume, Ayako (Hrsg.): Human-Computer Interaction, S. 42–57, Springer Nature Switzerland, Cham, 2024, ISBN: 978-3-031-60412-6. Software Engineering Meets Large Language Models Buch BoD – Books on Demand, Norderstedt, 2024, ISBN: 9783759759535.2026
2025
2024