@article{sziburisHandMotionCatalog2025,
title = {Hand Motion Catalog of Human Center-Out Transport Trajectories Measured Redundantly in 3D Task-Space},
author = {Tim Sziburis and Susanne Blex and Tobias Glasmachers and Ioannis Iossifidis},
editor = {Nature},
url = {https://www.nature.com/articles/s41597-025-05576-7},
doi = {10.1038/s41597-025-05576-7},
issn = {2052-4463},
year = {2025},
date = {2025-07-24},
urldate = {2025-07-24},
volume = {12},
number = {1},
pages = {1293},
publisher = {Nature Publishing Group},
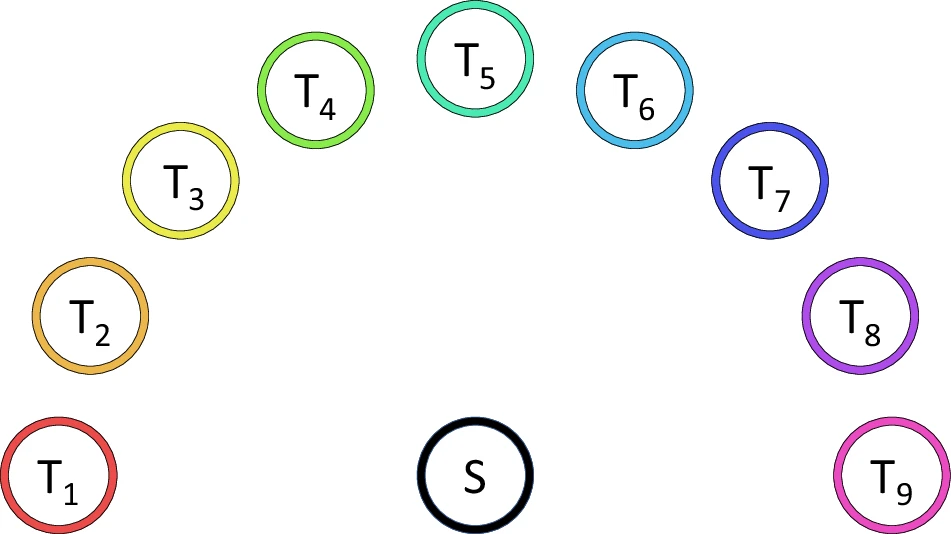
abstract = {Motion modeling and variability analysis bear the potential to identify movement pathology but require profound data. We introduce a systematic dataset of 3D center-out task-space trajectories of human hand transport movements in a standardized setting. This set-up is characterized by reproducibility, leading to reliable transferability to various locations. The transport tasks consist of grasping a cylindrical object from a unified start position and transporting it to one of nine target locations in unconstrained operational space. The measurement procedure is automatized to record ten trials per target location and participant. The dataset comprises 90 movement trajectories for each hand of 31 participants without known movement disorders (21 to 78 years), resulting in 5580 trials. In addition, handedness is determined using the EHI. Data are recorded redundantly and synchronously by an optical tracking system and a single IMU sensor. Unlike the stationary capturing system, the IMU can be considered a portable, low-cost, and energy-efficient alternative to be implemented on embedded systems, for example in medical evaluation scenarios.},
keywords = {BCI, Biomedical engineering, Motor control, Physiology},
pubstate = {published},
tppubtype = {article}
}